¶ Introduction
The ICAO definition of area navigation is: A method of navigation which permits aircraft operation on any desired flight path within the coverage of ground-based or space-based navigation aids or within the limits of self-contained aids, or a combination of these.
The first references to area navigation, shortened as RNAV, can be found during the years 1960s where its development has been started.
The position of the aircraft is known using various sensors that can compute its position. RNAV can then be summed up as the ability of an aircraft to navigate, computing change of tracks from one point to another, using only coordinates.
¶ Area navigation route
The aircraft using area navigation should be able to fly to any position on earth without NAVAID references.
RNAV is an instrument-based navigation method that leads to fly from a waypoint (geographic point inside an airspace) to another waypoint directly.
A waypoint is a specified geographical location used to define an area navigation route or the flight path of an aircraft employing area navigation.
Contrary to conventional navigation based on NDB and VOR, RNAV does not expect fixes to be defined in relation to conventional means, but rather by geographical coordinates.
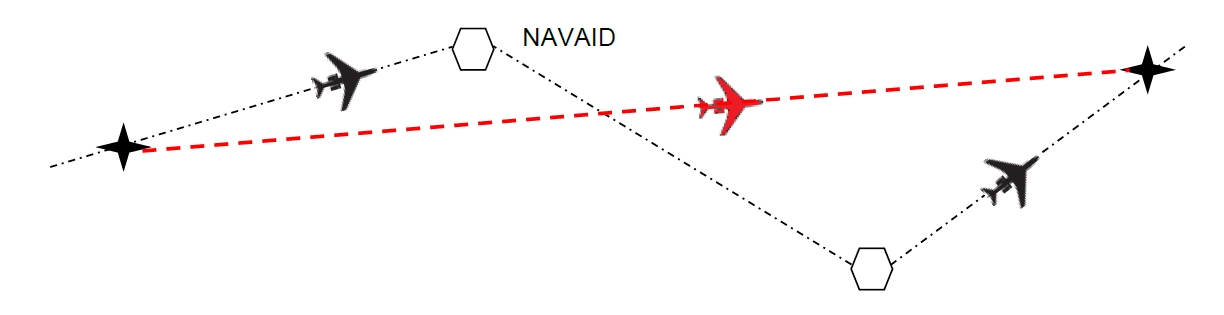
Figure: Red path is area navigation, black path is conventional navigation.
A waypoint is defined as a geographic coordinate (in WGS84) and is identified either:
- by a 5 letter unique name code (example KOKOS)
- by a 3 letter ICAO identifier if located with a ground based NAVAID for that station (example KIK)
- by an alphanumeric name code: 2 letter representing airfield ICAO code and 3 numbers (example RS604).
¶ RNAV Navigation Methods
¶ Principles of Area Navigation
As we said in the introduction to this document:
Flying RNAV is the ability to compute aircraft's position using various sensors:
- GNSS (including GPS) : satellite-based (in conjunction with augmentation systems)
- DME/DME positioning : ground-based
- VOR/DME positioning : ground-based
- More rarely, INS/IRS and era-related instruments : self-contained
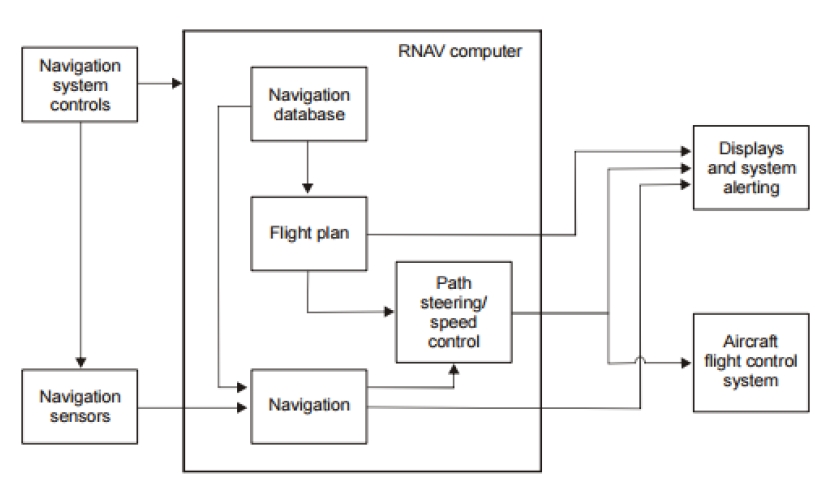
The navigation function computes data from a variety of navigation sensors, including GNSS, DME, VOR and IRS, that can include aircraft position, velocity, track angle, vertical flight path angle, drift angle, magnetic variation, barometric-corrected altitude, and wind direction and magnitude.
Computation can be interpreted in regard to a navigation database by a flight management system (FMS)
¶ Precision
Standards are being established as well as navigation performance specification:
- RNAV10: used only in en route oceanic/remote flight phase
- RNAV5: used in en route continental or arrival part of an approach flight phase
- RNAV2: used in en route continental, departure or arrival part of an approach flight phase
- RNAV1: used in en route continental, departure, arrival part of an approach, initial or intermediate part of an approach flight phase
A RNAV-'X' specification means that an aircraft must be able to achieve lateral navigation while being 95% of flight time accurate within a precision of 'X' nautical miles.
Monitoring systems must ensure the ability to detect any failure of computation or sensors.
¶ RNAV Specific function
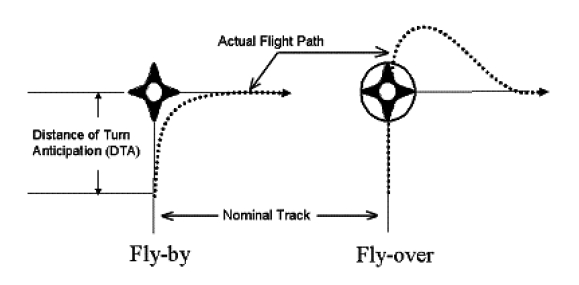
Fly-by turns are a key characteristic of an RNAV flight path. The RNAV system uses information on aircraft speed, bank angle, wind, and track angle change, to calculate a flight path turn that smoothly transitions from one path segment to the next.
Fly-by and fly-over method can be used to accomplish lateral navigation and flightpath made of successive waypoints:
- RNAV waypoints are defined by geographic coordinates (latitude and longitude) and do not rely anymore on conventional means (VOR and/or DME)
- RNAV waypoints can be either "fly-over" or "fly-by".
- Some waypoints such as Missed Approach Point (MAPt) are always defined as "fly-over".
Along a RNAV flightpath, a turn between two segments will require a minimum segment length to make sure aircraft will have time to be stabilized, in particular between two fly-over waypoints. Therefore, additional restrictions and corrections can take place: speed, wind effect, bank angle, etc...
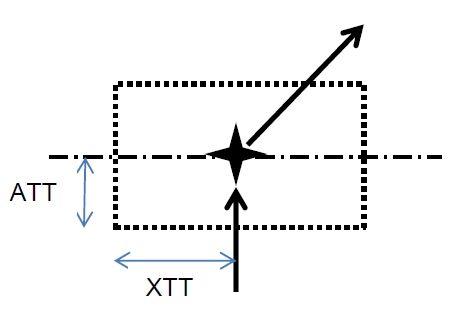
As flight computers are not perfect, waypoints have a precision tolerance:
- XTT for cross-track
- ATT for along-track.
RNAV systems may provide the capability for the flight crew to fly a route using a lateral offset from a defined route. Generally, lateral offsets can be specified in increments of 1 NM up to 20 NM.
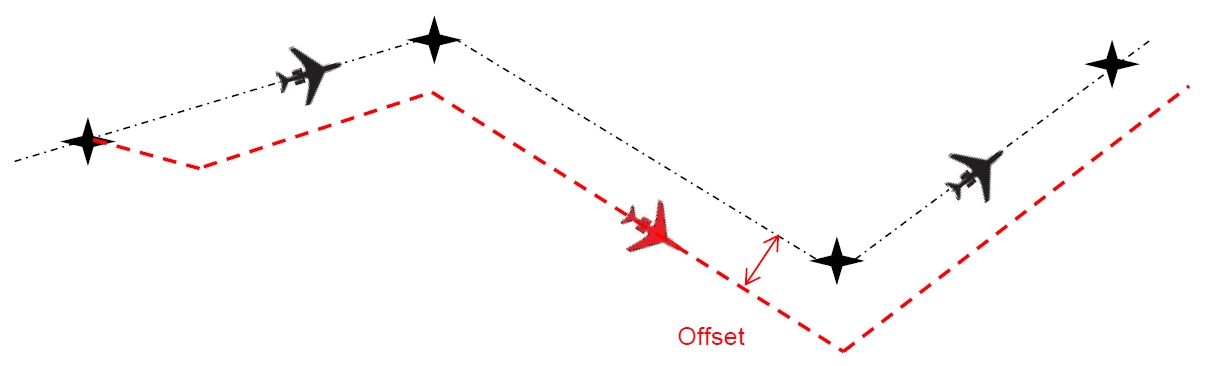
When a lateral offset is activated in the RNAV system, the RNAV aircraft will depart the defined route and typically intercept the offset at a 45 degree or less angle. When the offset is cancelled, the aircraft returns to the defined route in a similar manner.
¶ En-route Operations
¶ Continental airspace
En-route operations are subject to RNAV-5 specifications named "Basic RNAV". The full list of approved sensors for RNAV system includes:
- VOR/DME
- DME/DME(/IRU)
- GNSS
- LORAN (not used in IVAO and obsolete in real aviation)
RNAV routes are established assuming that radar control will be provided.
Obstacle clearance being calculated:
- Primary area 5NM both sides of flightpath
- Secondary area up to 10NM both sides
- Minimum obstacle clearance (MOC): 2000ft
En-route specifications tend to be updated to RNAV-2 and RNAV-1 specifications, excluding VOR/DME and LORAN sensors.
¶ Oceanic airspace
Oceanic and continental remote operations are subject to RNAV-10 specifications.
This concerns in particular:
- Pacific Ocean FIRs, including NPRS, CEPRS and PACOTS.
- Atlantic Ocean : EUR-SAM routes
- Peru/Chile routes
- Australia/Asia/Mid-East/Europe routes.
The full list of approved sensors includes:
- Single/Dual GNSS without time limitations
- Dual IRU limited to 6.2 hours.
Loss of RNAV capability during oceanic operations shall be considered as a serious failure by aircrew.
Air traffic flows will be sequenced as to ensure 50NM lateral and longitudinal separation. Usual oceanic operation regulations have to be made (position reports...). Automatic Dependent Surveillance can be used to transmit automatic position report (time-out or distance-out).
New oceanic specifications are being developed, in order to adopt RNP-4 specifications. New Zealand and Australia are pioneering this specification over their airspace. One point is to enable a 30NM lateral and longitudinal separation. African continental routes are also being developed with RNP-4 specifications
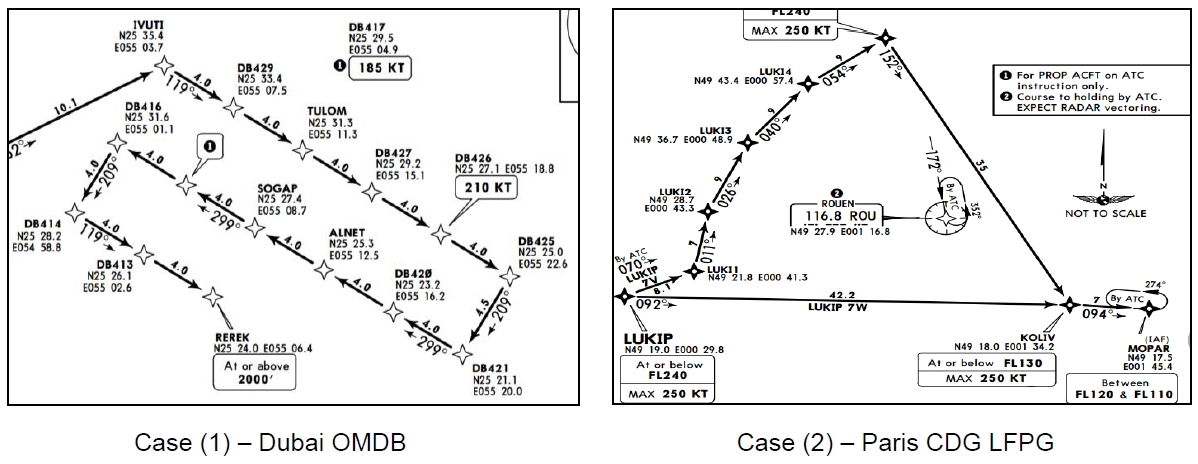
¶ RNAV routes on charts
On SkyVector.com, these routes are depicted in blue. For example, we can look at the description of UT139 in ASECNA AIP
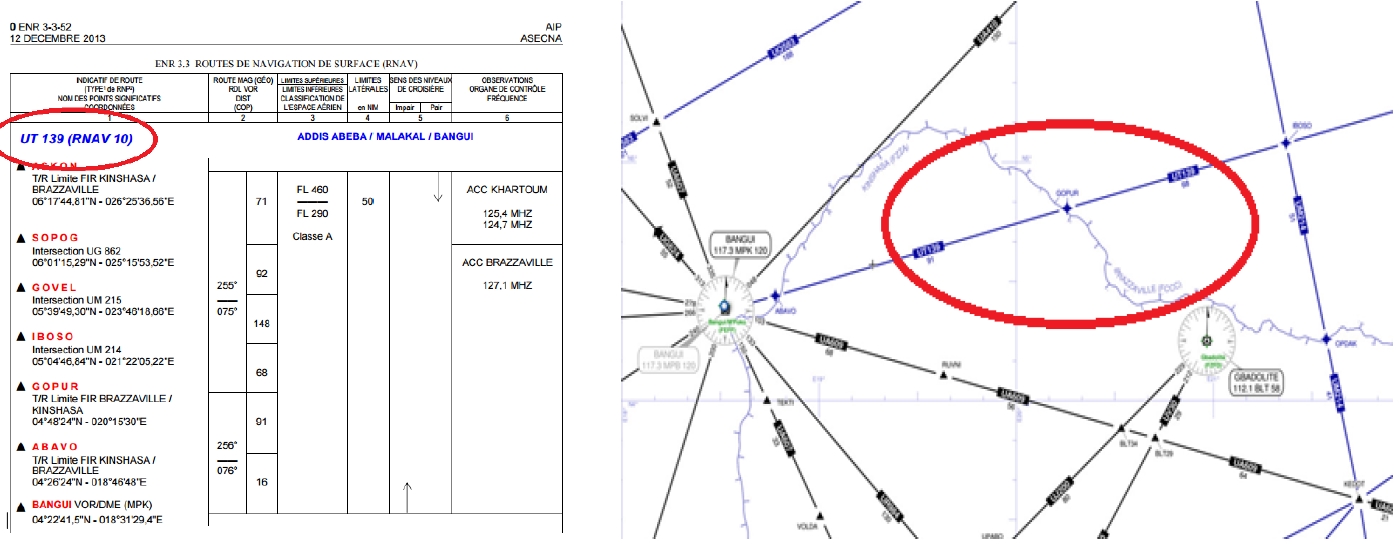
We can see that the airway is in blue as expected, and also, descriptor emphasises RNAV10 required.
¶ Free Route Airspace
Free Route Airspace (FRA) is the latest innovation in air navigation. Currently in deployment within various Eurocontrol-member airspaces, the goal is to suppress airways. It results then in a gain of performance for flights since completely direct routes lead to reduction in fuel consumption.
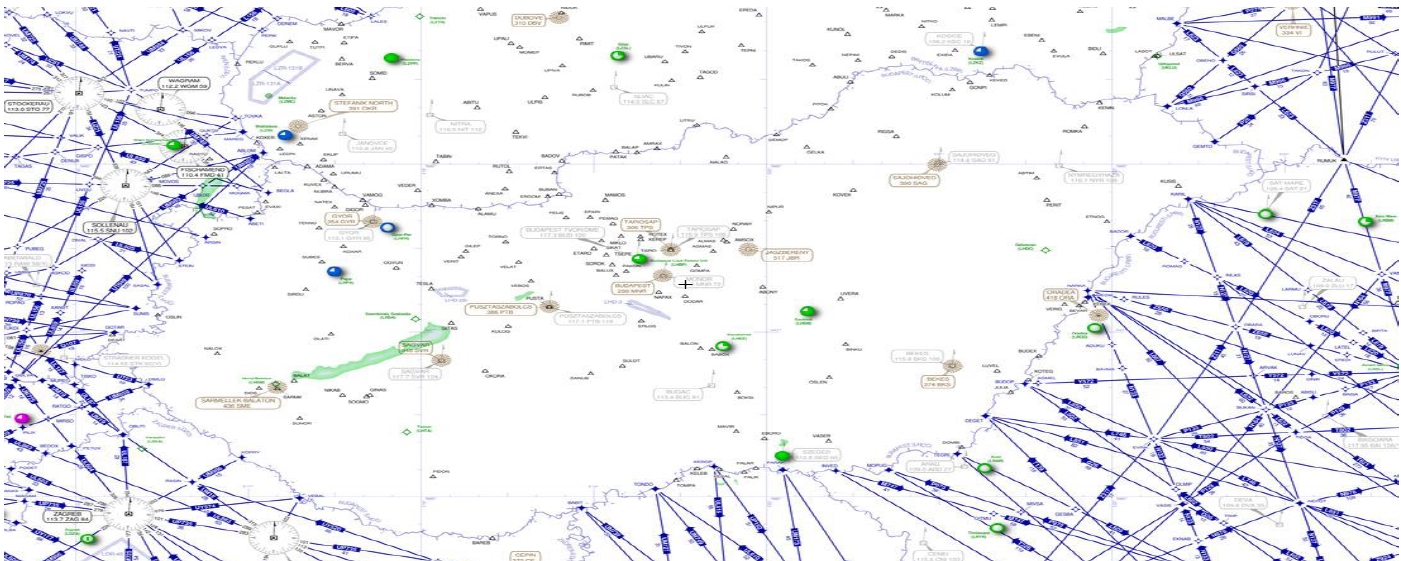
Example: Budapest airspace
The only rule is that the direct shall remain within airspace and must not pass through dangerous areas.
¶ Terminal Operations
¶ Generalities
Terminal operations are subject to RNAV-1 specifications, sometimes named as "Precision RNAV". The full list of approved sensors includes:
- DME/DME(/IRU)
- GNSS
Terminal operations cover Departure, Arrival and Approach procedures.
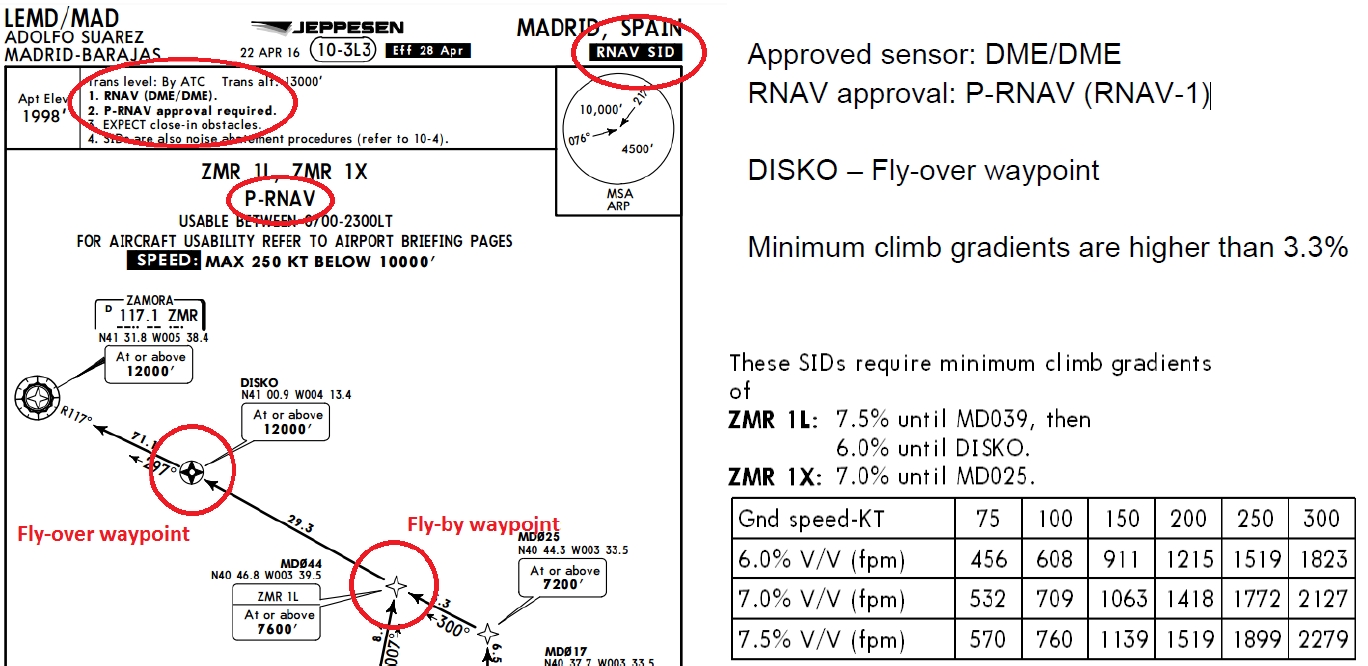
¶ Standard Instrument Departure (SID) RNAV Departures
RNAV SIDs are classified into two categories
- Straight Departures
- Turning Departures in which turns are higher than 15 degrees
Obstacle clearance is calculated as follows:
- Aircraft will climb straight at least until 394ft after take-off (even for turning departures).
- Climb gradient is 3.3% (201ft/NM). It may be higher depending on terrain and ATC constraints
- Obstacle assessment Surface gradient is 2.5%
Case study: Madrid LEMD -- ZMR 1L\1X RNAV SID
¶ Omnidirectional Departures
When no SID is defined for a given airport, an omnidirectional departure to join an en route waypoint can be published or recommended.
There are two types:
- Type A -- Climb to a specified altitude before joining a waypoint
- Type B -- Fly to a specific location before joining a waypoint
Omnidirectional departures generally require a higher climb gradient than nominal 3.3%.
Obstacle clearance is calculated as follows:
- When no obstacles penetrate the 2.5% obstacle assessment surface, and 300ft of clearance is guaranteed, a 3.3% climb gradient is required until 394ft before any turn can be performed
- Where obstacles prevail, a 3.3% climb gradient is required until a specified altitude where the turn can be performed with a 300ft
clearance - When an obstacle exists, procedure may require a higher climb gradient than 3.3%
- When an obstacle exists, procedure may prohibit turn to rejoin a particular sector.
Study case: Montpellier LFMT -- Omnidirectional departures (all runways)
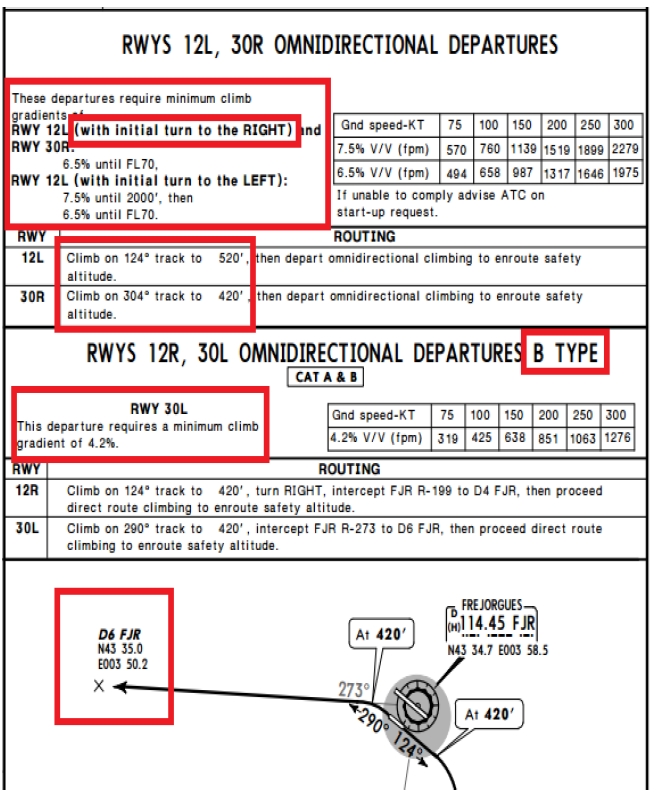
Runway 12L, 30R:
- Type A
- Target altitude depends on runway
- Mandatory 1st turn
- Specific climb gradient
Runway 12R, 30L:
- Type B
- Published flightpath to target point
- Specific climb gradient
Note: Omni departure 12R does not have specific climb gradient. Default value of 3.3% must be taken into account.
¶ Standard Terminal Arrival Route (STAR) RNAV Arrivals
RNAV STARs serve the same purpose as their conventional ones.
The obstacle clearance will ensure for 5NM either side of the published route a 984ft-clearance.
Study case: Dublin EIDW -- RNAV STAR RUNWAY 10
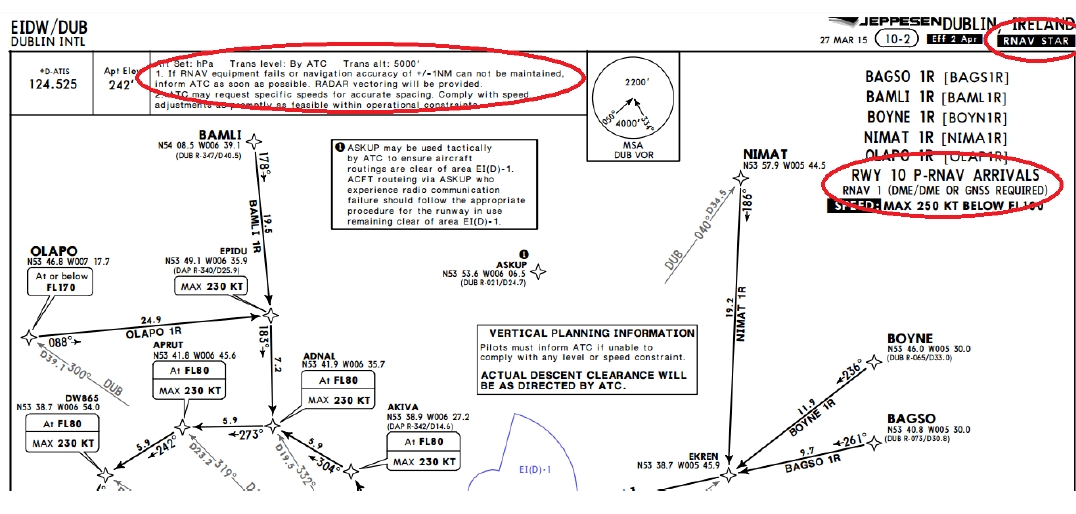
P-RNAV (RNAV-1) arrivals, with DME/DME or GNSS sensor.
¶ Omnidirectional RNAV arrival
When considering omnidirectional RNAV arrivals, these can be of two types:
- Minimum Sector Arrival (MSA): a minimum clearance of 984ft within 25NM of a specified navaid.
- Terminal Arrival Altitude (TAA): provide Initial Approach Fix selection and associated safety altitude within 25NM of the Intermediate Approach Fix. A 5NM buffer will be added for safety reasons. Two subtypes are Y-shaped and T-shaped for convenience. Clearance is 984ft.
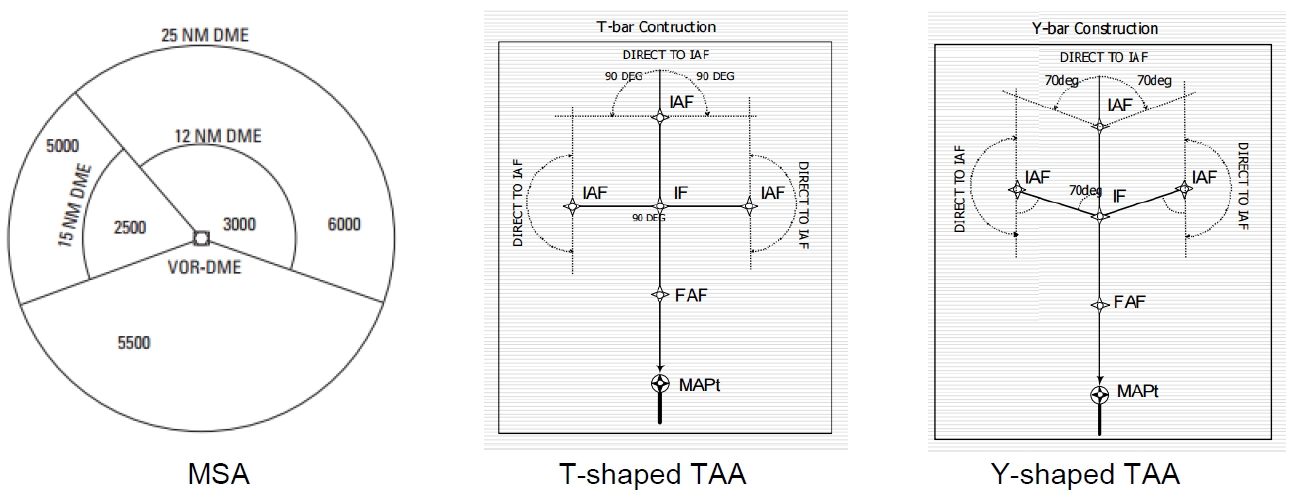
Some characteristics of TAA usage:
- Reversal procedure is not necessary as IAF is dependent on aircraft arriving direction
- Direct to IAF and IF are possible given course change is less than 90°. Also the resulting turn to the next waypoint must not exceed 110° for Initial segment, 45° for Intermediate segment.
- Direct to FAF is strictly forbidden
Study case: Bogota SKBO -- RNAV (GNSS) RUNWAY 13L
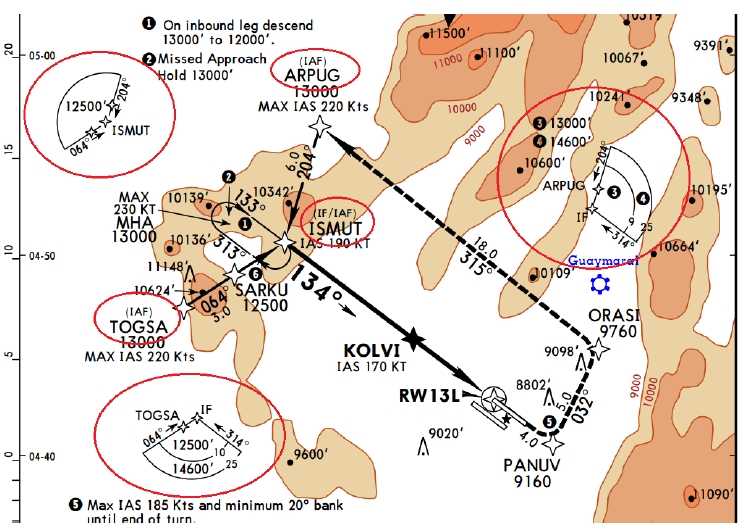
Example: Omnidirectional arrival is based on TAA, Y-shaped:
- ISMUT IAF for arrivals with inbound track to ISMUT IF between 064° and 204°
- ARPUG IAF for arrivals with inbound track to ISMUT IF between 204° and 314°
- TOGSA IAF for arrivals with inbound track to ISMUT IF between 314° and 064°
¶ Enhanced arrival flightpath & Merge Point
Procedure designers have developed two particular arrival trajectories especially for crowded airports:
- Flightpaths designed to sequence traffic such as waiting lanes
- Merge point designed to delay traffic without entering any holds, alike DME arcs
In these cases, ATC should shorten the route when traffic sequence allows it.
¶ Approach Operations (RNP)
¶ Generalities
Approach operations are subject to an enhanced RNAV: Required Navigation Performance (RNP). GNSS is assumed as the navigation sensor.
However, to increase its accuracy, it is associated with an 'X'-Based Augmentation System (xBAS):
- Satellite (SBAS) for LPV approaches
- Ground (GBAS) for GLS approaches
- Aircraft (ABAS) for standard LNAV & LNAV/VNAV approaches
For aircraft-based augmentation related approaches (such as LNAV and LNAV/VNAV), satellite alerting functionality, named RAIM, must be available (at least 5 satellites). RAIM will check for signal and computing integrity.
With RNP, we do not speak anymore of navigation accuracy but rather system reliability alert limit.
Segment characteristics will vary depending on the approach segment the aircraft is on:
- Initial: MOC 984ft, Opt. Gradient 4.0%, Max Turn at IF 120°, Opt. length 5NM (6NM after STAR)
- Intermediate: MOC 492ft, Opt. Gradient Flat, Max Turn at FAF 30°, Min 2NM straight segments
- Final: MOC 246ft, Opt. Gradient 5,2% (3.00°), aligned with runway centerline, Opt length 5NM
- Missed Approach: MAPt is ALWAYS a fly-over, aligned with runway (extended if req.) centerline
¶ LNAV Approach
LNAV approach is the first type of RNAV approach, providing only lateral guidance, up to full scale course deviation of 0.3NM:
- It is a non-precision approach. RNP GNSS approach coupled to ABAS/SBAS is required.
- Final descent is based on a minimum descent altitude/height (MDA/H).
- It is expected to perform a stepped descent to safety altitudes rather than continuous descent.
In some countries, MDA-based final descent can be converted into continuous descent (CDFA), and amongst these regulations, part of them will require adding a margin called add-on to ensure no descent below MDA at decision altitude/height (DA/H).
For aircraft only equipped with ABAS, RAIM must be available for the entire duration of the approach.
Note that only advanced aircraft including a FMC in flight simulators can compute this type of flightpath.
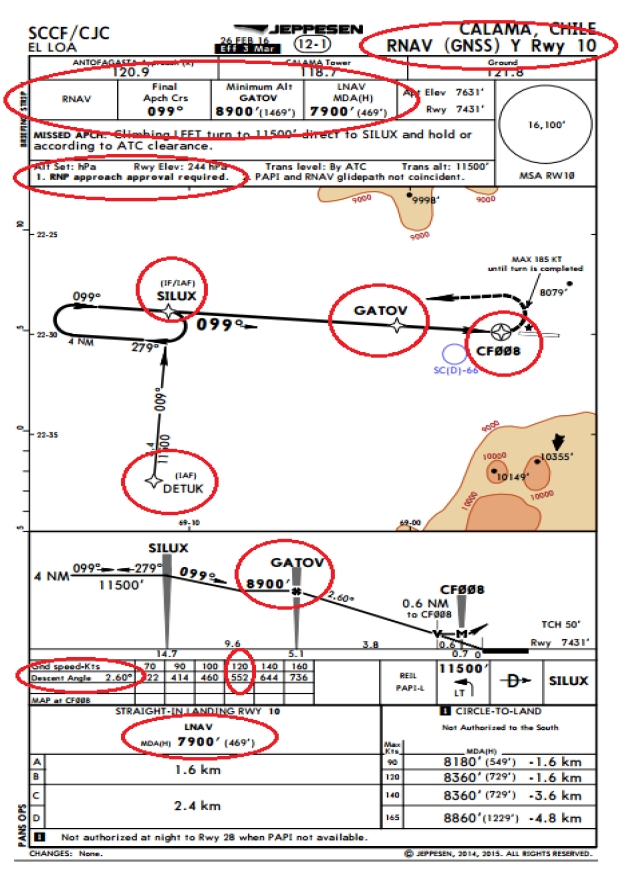
Study case: Calama SCCF -- RNAV GNSS Y RUNWAY 10
| RNP approach approval required |
| IF: SILUX | FAF: GATOV |
| Descent angle: 2.60° ; 552’/min @ 120kts ; 276’ per NM | MDA: 7900’ |
| Go-around: CF008 is a fly-over waypoint as MAPt |
Following altitude-check table can be built (do not descend below MDA except if visual is acquired):
| Dist to CF008 (NM) | 4.4 | 4.0 | 3.0 | 2.0 | 0.1 | 0.6 |
| Altitude (ft) | 8900 | 8790 | 8510 | 8240 | 7960 | 7850 |
¶ LNAV/VNAV Approach
LNAV/VNAV approach is the second type of RNAV approach, providing lateral and vertical guidance, up to full scale course deviation of 0.3NM. Vertical flightpath is either computed by FMS or provided by SBAS.
- It is an Approach with Vertical Guidance (APV). RNP GNSS approach coupled to ABAS/SBAS is required. Minima can be either MDA/H or DA/H. No offset approach is permitted.
- Published vertical path angle (opt. 3°, max 3.5°) leads to continuous descent final approach (CDFA).
In some countries, MDA-based final descent can be converted into continuous descent (CDFA), and amongst these regulations, part of them will require adding a margin called add-on to ensure no descent below MDA at decision altitude/height (DA/H).
For aircraft only equipped with ABAS, RAIM must be available for the entire duration of the approach.
In addition to LNAV approach, aircraft computing vertical profile from authorized baro systems can only operate above a specified temperature.
Note that only advanced aircraft including a FMC in flight simulators can compute this type of flightpath including full capacity of VNAV with LNAV.
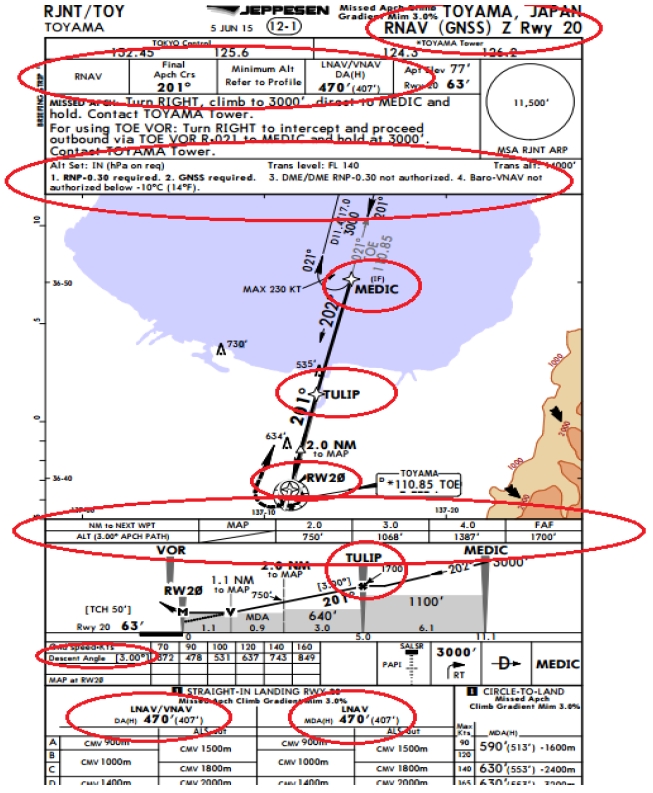
Case study: Toyama RJNT -- RNAV GNSS Z RUNWAY 20
| RNP with GNSS approach approval required (DME/DME sensor prohibited) |
| Procedure prohibited when temperature below -10°C. |
| IF: MEDIC | FAF: TULIP |
| Descent angle: 3.00° | MDA: 470’ |
| Go-around: RW20 is a fly-over waypoint as MAPt |
| Jeppesen provides an altitude-check table. |
| In case of VNAV inoperability, LNAV-only fallback is provided. |
¶ LPV Approach
Localizer Performance with Vertical Guidance (LPV) approach is the third type of RNAV approach.
- Flightpath is completely acquired by SBAS signal.
- Same use of an ILS, a LOC and a GS which are simulated by RNAV systems.
Depending on the certification, LPV is either an APV or a Precision Approach (LPV200). RNP GNSS approach coupled to SBAS is required. Minima are DA/H. No offset approach is permitted.
Note that today there is very few add-ons in our flight simulator software (example: RealityXP) that enable LPV in flight simulators based on WAAS (North America)
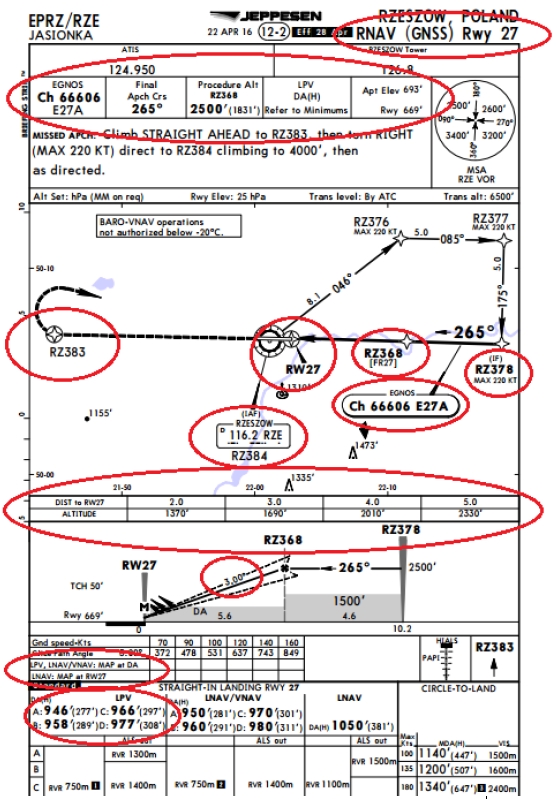
Case study: Rzeszow EPRZ -- RNAV GNSS RUNWAY 27
| RNP with GNSS approach approval required (DME/DME sensor prohibited) SBAS receiver required on EGNOS channels |
| EGNOS Channel: 66606 E27A |
| IAF: RZ384 IF: RZ378 FAF: RZ368 – FR27 |
| Descent altitude: 2500’ Descent angle: 3.00° DA: Depends on A/C cat. Go-around: RW27 is a fly-over waypoint as MAPt |
| Particularities: Missed approach point depends on which approach is performed. |
| In case of SBAS failure: LNAV/VNAV and LNAV fallback are provided. Along with those fallbacks, altitude-check table is provided. |
¶ GLS Approach
GBAS Landing System (GLS) approach is the fourth and last type of RNAV approach.Flightpath is completely acquired by GBAS signal. Same use of an ILS, a LOC and a GS is enabled by RNAV systems.
GLS approach is considered as a Precision Approach. Performances are currently equivalent to ILS Cat I. RNP GNSS approach coupled to GLS is required. Minima are DA/H. No offset approach is permitted.
Note that today there is no known add-ons simulating this type of approach.
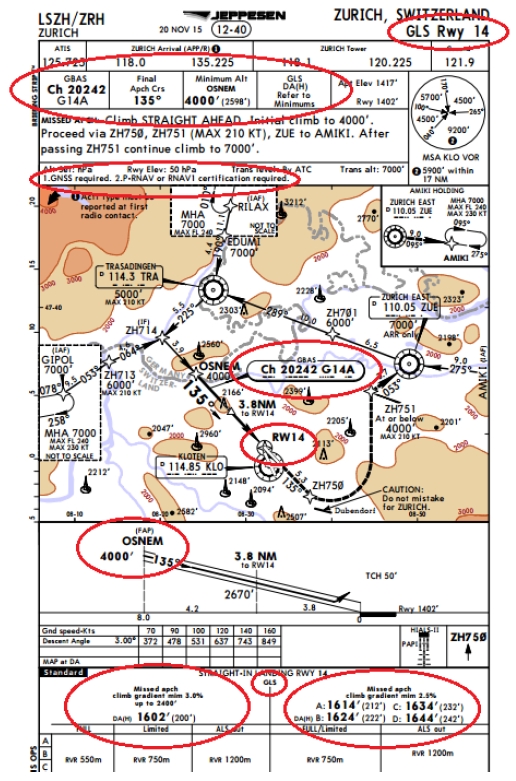
Case study: Zurich LSZH -- RNAV GLS RUNWAY 14
| RNP with GNSS approach approval required (DME/DME sensor prohibited) GBAS receiver required. |
| GBAS Channel: 20242 G14A |
| IAF: RILAX - GIPOL IF: ZH714 FAP: OSNEM |
| Descent altitude: 4000’ Descent angle: 3.00° DA: Varies on A/C cat and climb gradient Go-around: RW14 is a fly-over waypoint as MAPt |
| Particularities: Contrary to ILS and LPV, guidance is not angular but linear. See depiction. |
| In case of GBAS failure: No fallback is provided. |
¶ Other Operations
¶ Overlay Method
An aircraft is said flying Overlay when it performs a procedure conceived for conventional use with the help of the RNAV. The conventional means of navigation must be operative.
The greatest interest apart from waypoint visualization is the possibility to practically transform any final descent into continuous final descent (CDFA) by calculating a flightpath in reference to RNAV distance remaining to the various waypoints of the procedure, mainly the runway threshold.
Formerly, non-precision approaches were made to be flown "Dive & Drive", which means that the aircraft was supposed to descent to minimum safety altitude as soon as possible. It resulted in a stepped descent which involves more fuel consumption, noise and focus.
As we already said, converting a non-CDFA approach MDA (minimum descent altitude) into a CDFA approach DA( decision altitude) requires in some countries an additional obstacle clearance .
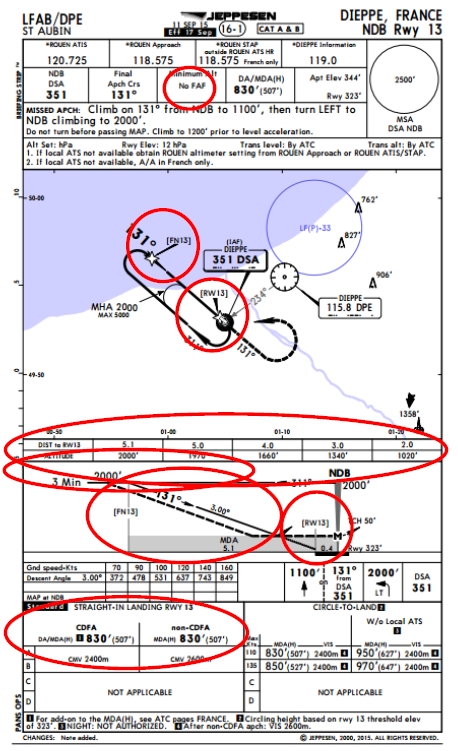
Study case: Dieppe LFAB -- NDB RUNWAY 13
| This chart describes a conventional approach (NDB) including all necessary information to perform it with overlay method. |
| It includes waypoints to represent a pseudo-FAP and the missed approach point in case of CDFA. We can clearly observe the different flightpaths between CDFA (solid line) and non-CDFA (dashed). |
| It also provides for the pilot an altitude-distance check table based on MA13. |
| Caution, FMC or GNS may not be able to code racetrack. Basic IFR knowledge remains. In case of doubt, rely on conventional methods. |
¶ Helicopter RNAV Operations
Dedicated RNP/RNAV approach operations have been created for helicopters. It allows guidance on adapted flightpath specific to helicopter flying (low airspeed, great descent angle...)
Operations can be either LNAV or LPV.
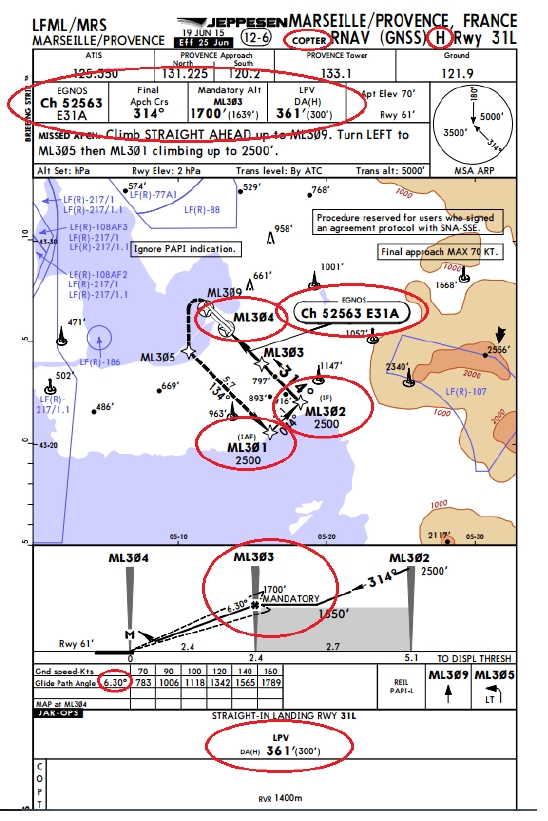
Case study: Marseille LFML -- RNAV GNSS H RUNWAY 31L
Chart clearly states that this approach can only be performed by helicopters
H in procedure descriptor often refers to copter
| Type: LPV EGNOS Channel: 52563 E31A |
| IAF: ML301 IF: ML302 FAF: ML303 |
| Descent altitude: 1700’ Descent angle: 6.30° DA/H: 361’/300’ Go-around: ML304 is a fly-over waypoint as MAPt |
| In case of SBAS failure: No fallback is provided. |
¶ RNAV Holdings
Refer to IVAO documentation SPP/APC "Holding procedures"
¶ Conclusion
Some RNAV operations require the ability to monitor and alert automatically the pilot if integrity comes to fail. This is Required Navigation Performances -- RNP concept.
Since no pure RNAV approach exists, the only dealt-with RNP subject in this documentation will be in regard to approach application. Refer to appropriate documentation for further information.
However, like any system, these RNAV sensors can fail, and failures must be detected. Therefore, navigation accuracy and reliability should be calculated as to set acceptable minimums.
Please note that in today's regulations, RNAV is generally required for all aircraft operating above a certain flight level.
- None
- None
- VID 200696 - Creation
- VID 150259 - Update
- VID 531824 - Wiki Integration
- VID 496402 - Wiki.js integration