¶ Introduction
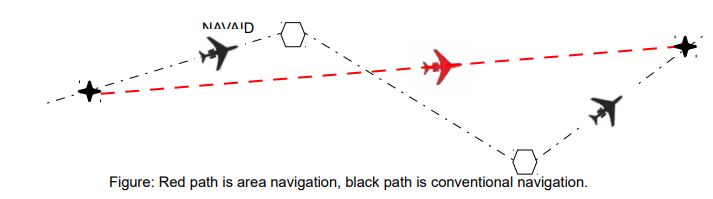
RNAV is an instrument-based navigation method that leads to fly from a fix (geographic point inside an airspace) to another fix directly. Contrary to conventional navigation based on NDB and VOR, RNAV does not expect fixes to be defined in relation to conventional means, but rather by geographical coordinates.
The aircraft using area navigation should be able to fly to any position on earth without NAVAID references.
The position of the aircraft is known using various sensors that can compute its position. RNAV can then be summed up as the ability of an aircraft to navigate, computing change of tracks from one point to another, using only coordinates.
¶ Principles
A RNAV-'X' specification means that an aircraft must be able to achieve lateral navigation while being 95% of flight time accurate within a precision of 'X' miles. (example: RNAV2, RNAV5...) A monitoring system must ensure the ability to detect any failure of computation or sensors.
Standards are being established as well as navigation performance specification:
Fly-by turns are a key characteristic of an RNAV flight path. The RNAV system uses information on aircraft speed, bank angle, wind, and track angle change, to calculate a flight path turn that smoothly transitions from one path segment to the next.
To successfully accomplish lateral navigation, a flightpath is made of successive waypoints:
- RNAV waypoints are defined by geographic coordinates (latitude and longitude) and do not rely anymore on conventional means (VOR and/or DME)
- RNAV waypoints can be either "fly-over" or "fly-by".
- Some waypoints such as Missed Approach Point (MAPt) are always defined as "fly-over".
- Waypoints have precision tolerance: XTT for cross-track and ATT for along-track.

Along a RNAV flightpath, a turn between two segments will require a minimum segment length to make sure aircraft will have time to be stabilized, in particular between fly-over waypoints.
Therefore, additional restrictions and corrections can take place: speed, wind effect, bank angle, etc...
Please note that in today's regulations, RNAV is generally required for all aircraft operating above a certain flight level.
¶ Database
CDUs as well as GNSs are relaying on a database called AIRAC cycle to operate.
This database is defined as follow:
- Each cycle is defined by the year by two digits followed by the number of the cycle in the year. At the time of writing, cycle 1609 is effective (9th cycle of 2016).
- An AIRAC cycle is valid only for 28 days.
- After 28 days, a new AIRAC cycle is published
AIRAC cycle contains pretty much the same elements of a country Aeronautical Information Publication (AIP):
- Airways
- Waypoints
- Airports
- Runways
- SID
- STAR
- Approaches
- Navaids
¶ Procedure coding
In relation to RNAV, database study is particularly important as it follows strict conventions.
There are two main coding particularities: waypoint naming and leg types.
¶ RNAV waypoint naming
Waypoints are named in different ways:
- VOR/NDB or an airport: named using their identifier (i.e. LND VOR, EGLL airport)
- Waypoints when they are non-physical waypoints: defined by their coordinates and named using 5 or 6 letters (i.e. MERIT, ROMAM...)
- RNAV waypoints located in an RNAV approach route: waypoints are named such as the two last letter of the ICAO identifier of the airport plus 3 figures XXnnn (n=figure, X=letter) (i.e. RS604)
- Constructed waypoints for FMC: named using a defined radial and a distance DnnnX (n=figure, X=letter). The number 'nnn' represents the radial in degrees and the X the order of the letter inside the alphabet is the distance located at n NM. (i.e. D206J = Radial 206° 10NM)
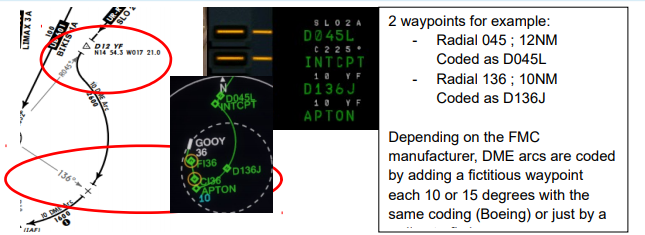
Example: SLO2A arrival Dakar GOOY
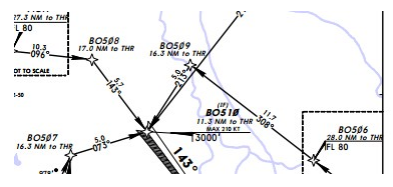
Example: Around Toulouse LFBO Airport, RNAV waypoints are named BO601, BO602, BO603...
For approach procedures, waypoints generally follow these conventions, where xx is the runway identifier:
- CIxx/CSxx as a waypoint where the final course should be established, generally the IF
- FDxx/FIxx/FNxx/FSxx as where the final descent should be initiated, generally the FAF/FAP
- Maxx/MDxx as the missed approach point of a procedure
- RWxx as the runway threshold (often used for descent altitude-distance check).
- Any step down fix will have a proper waypoint
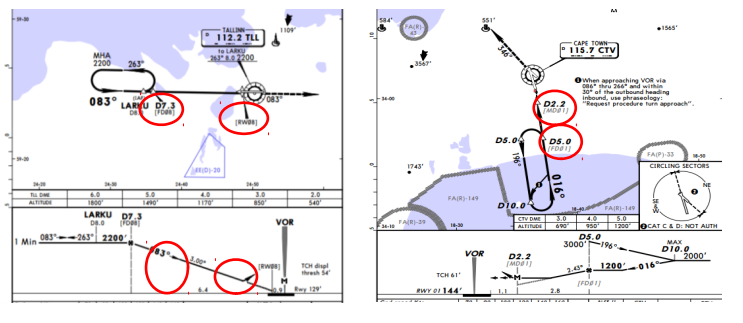
Example:
- Left: Tallinn EETN -- VOR (Overlay) RUNWAY 08
- Right: Cape Town FACT -- VOR Z RUNWAY 01
¶ Leg types
A leg is the segment joining two points. Depending on the intended flightpath, it is defined by a path type and a terminator. It results in 14 different leg types.
| Path | Terminator | ||
|---|---|---|---|
| Constant DME arc | A | A | Altitude |
| Course to | C | C | Distance |
| Direct Track | D | D | DME Distance |
| Course from a fix to | F | F | Fix |
| Holding pattern | H | I | Next leg |
| Initial | I | M | Manual termination |
| Constant radius | R | R | Radial termination |
| Track between | T | ||
| Heading to | V |
| Leg types | |
|---|---|
| Identifier | Description |
| CA | Course to an Altitude |
| CF | Course to a Fix |
| DF | Direct to a Fix |
| FA | Fix to an Altitude |
| FM | Fix to a Manual Termination |
| HA | Racetrack Course Reversal (Altitude Termination) |
| HF | Racetrack (Single Circuit – Fix Termination) |
| HM | Racetrack (Manual Termination) |
| IF | Initial Fix |
| TF | Track to a Fix |
| RF | Constant Radius Arc |
| VA | Heading to an Altitude |
| VI | Heading to an Intercept |
| VM | Heading to a Manual Termination |
¶ ATC & RNAV Management
¶ Clearance Delivery
ATC shall favour RNAV SID and RNAV STAR when aircraft are RNAV-equipped.
However, ATCs shall remain precautious about RNAV approaches for three reasons:
- Virtual pilots are not usually trained to these kinds of approach
- Flight Simulators addons may not be able to follow RNAV approach.
- Some aircraft are not equipped with VNAV and may not fly all types of RNAV approaches.
Advise: when an ILS is present, do not hesitate to use the ILS before the RNAV procedure.
¶ En route
Upon initial contact and radar identification, ACC controllers should issue a direct to RNAV-equipped aircraft in order to shorten flight distance and optimize flight time and traffic flow.
Issuing a direct to an aircraft must respect the following rules as standard and recommendation:
- Above 10,000ft, it remains at least 9NM to go to the current fix
- Below 10,000ft, it remains at least 6NM to go to the current fix
- The course change toward the next segment is less than 45°
¶ Arrival and Departure in Terminal area
¶ Published Routes
RNAV-1 routes are established as SID/STAR within a terminal region. Radar surveillance is mandatory.
Air Traffic Controllers are highly encouraged to optimize the traffic flow by issuing a direct as soon as possible. A direct should be made as to shorten flight duration and level flight.
A controller shall never send an aircraft to a waypoint not pertaining to the procedure except for emergency purposes.
The only exception would be a procedure without a holding to send the aircraft to a published hold.
Issuing a direct to an aircraft must respect the following rules as standard and recommendation:
- Above 10,000ft, it remains at least 9NM to go to the current fix
- Below 10,000ft, it remains at least 6NM to go to the current fix
- The course change toward the next segment is less than 45°
¶ Radar vectors on arrival
Vectoring should be made as to position the aircraft to the IAF or to the IF of the approach procedure.
A vectoring onto a RNAV procedure should end with:
- A direct to a fix, likely the IAF or the IF, or
- A clearance to intercept the final approach course.
Radar surveillance and identification is required before issuing any radar vectors. Respect MRVA.
Caution: If the vectoring ends with a direct to a fix, the subsequent course change shall not exceed 45°. In case of a clearance to intercept the final approach course, the last turn to final shall not exceed 50°.
¶ Approach
¶ On the procedure
Air Traffic Controllers are highly encouraged to optimize the traffic flow by issuing a direct as soon as possible. A direct should be made as to shorten flight duration and level flight.
Issuing a direct to an aircraft must respect the following rules as standard and recommendation:
- Turn toward the IAF or any point of the Initial segment should not exceed 90°
- Turn toward the IF or any point of the Intermediate segment should not exceed 45°
- No direct shall be given to the FAF/FAP or a point of the Final segment.
Radar surveillance and identification is required before issuing any radar vectors. Respect MRVA.
A controller shall never send an aircraft to a waypoint not pertaining to the procedure during an approach except for emergency or to send the aircraft to another published hold.
¶ Radar vectors on approach
Vectoring should be made as to position the aircraft to the IF or to the final approach course of the approach procedure. A vectoring onto a RNAV procedure should end with either instruction:
- A direct to a fix, likely the IF
- A clearance to intercept the final approach course.
Caution: unless aircraft is qualified for CDO (continuous descent operation), 30 seconds of stabilized level flight should be acquired before final descent when vectoring an aircraft onto the final approach course (see radar vectoring documentation).
Radar surveillance and identification is required before issuing any radar vectors. Respect MRVA.
¶ Management of non-RNAV traffic
As it should happen, you may encounter airplanes which are not RNAV-equipped.
These airplanes are relying on conventional means (VOR/NDB radials and DME).
To issue a direct for these aircraft require making sure the pilot will be able to rejoin the fix, even using the dead-reckoning method.
Therefore, it is highly recommend limiting directs to NDB and VOR within range.
ATC can use radar vectors in this case in order to optimize the route.
Given conventional approach procedures are often containing conventional turns and/or racetrack, which should be taken in account when sequencing traffic.
¶ Conclusion
RNAV is a navigation method to optimize traffic flow using the power of GNSS even though it implies tons of new rules, standards and recommendations to implement for every actors of the aviation industry.
However the future is already marching on, as the evolution of RNAV is already being developed and enhanced: the Required Navigation Performance (RNP).
- None
- None
- VID 200696 - Creation
- VID 200696 - Wiki Integration
- VID 496402 - Wiki.js integration