¶ Introduction
In normal situations, computers have always been more precise than human pilots and their ability to determine rapidly the results of any necessary calculations have made them irreplaceable in our cockpits.
Engineers have therefore designed systems to assist pilots in every possible phase of the flight. Two most visible systems of this sophistication are the flight director and the autopilot which both have very distinct goals for pilots while they remain complimentary.
This documentation will neither deal with any particular autopilot models, nor will it provide a full guide on how to operate your aircraft's autopilot. Please refer to your aircraft-specific operating manual.
¶ Control Panel
Since any automated systems require input parameters, your autopilot and the flight director will need such values as target attitude, speed, altitude, heading and so on.
In general, aircraft possess a control panel in order to select those values, but above all, you can select the flight mode which means how you want the aircraft to achieve what you are asking.
The understanding of any flight modes you intend to use is vital for the safety of your flight. Failure to do so may lead your flight to deviate from your plan of action or from ATC instructions.
¶ Type of control panel
¶ Basic modes
By default, engaging the flight director or/and the autopilot will lead the system to set up the aircraft such as:
- the current pitch is maintained (PITCH)
- the wings are leveled (ROLL)
PITCH and ROLL modes are the most basics flight modes that can be selected or that are automatically activated without other modes.
Attention: Since pitch is maintained without target altitude or target pitch angle, the pilot needs to fly the aircraft in the correct attitude prior to engaging the autopilot.
In this mode, the aircraft speed and the aircraft power/thrust have to be monitored at all times by the pilot. Failure to do so can lead to unwanted speed acceleration or deceleration, which may transform into stall or overspeed if detection fails.
¶ Simple modes
Simple modes will consist of maintaining specific flight parameters:
- altitude
- pitch angle
- heading or track
On some autopilot systems, the pilot may be able to select the target altitude. The aircraft will reach this altitude by maintaining a specific pitch angle either selected by the pilot or given at autopilot engagement. Upon reaching the target altitude, aircraft shall establish a level flight.
If he cannot select an altitude, the pilot will have to engage the altitude hold mode when reaching the target altitude. The aircraft will them maintain the altitude reached at the time of the engagement.
The altimeter should subsequently be monitored for each climb and descent.
Finally, if the aircraft is fitted with a heading/track selector coupled with a HSI for example, the pilot may select a specific course to be kept by the autopilot.
¶ Advanced modes
Depending on your aircraft equipment, capabilities may differ and some mode may be unavailable. The following modes are common on modern airliners but often not available on general aviation aircraft.
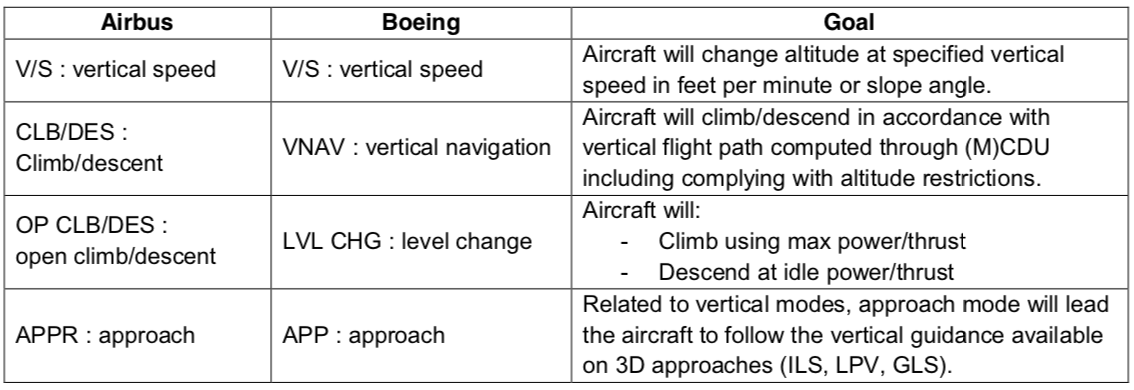
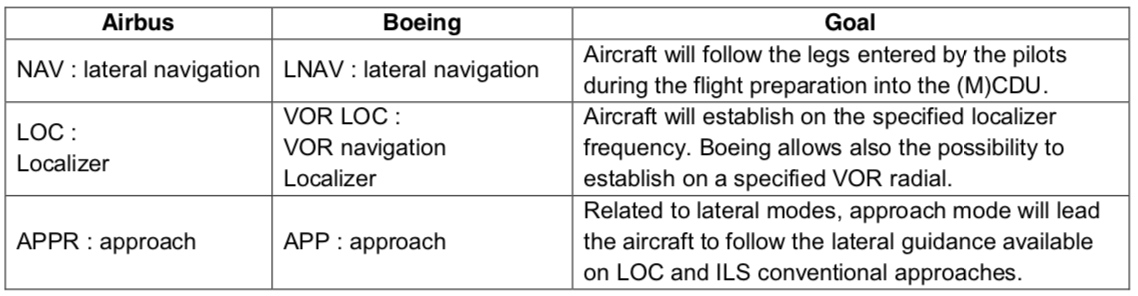
For the following subparts, we will address both Airbus A320 and Boeing B737 flight modes as to offer more understanding. However, it does not mean it does not exist on any other airliners or it does have/have not the same name. The most important is to get the goal of each mode and their differences.
¶ Vertical modes
The availability of a vertical mode is highly dependent of the existence of any automatic speed management system on your aircraft.
Refer to part 5 of this documentation for more information.
¶ Lateral modes
¶ Flight Mode Annunciator
The Flight Mode Annunciator (FMA) is a display that shows precisely the flight modes that are being engaged and on which the flight director and the autopilot rely.

In practice, any new flight mode activation must be announced as to make sure there is no ambiguity. This is based on the principle of performing an action (i.e. engaging a mode), then checking subsequently that the action was correct (i.e. checking that the FMA includes the new flight mode).
If at one point you cannot figure out what your aircraft is doing, check your FMA!
¶ Flight Director (F/D)
¶ Principle
The flight director is a display that appears above the attitude indicator (ADI, eADI or PFD for example) in order to indicate the position in which the pilot should bring his aircraft in order to accurately follow the flightpath he intended to fly using the flight modes he selected on his control panel.
It always shows a variation in pitch and roll to be made which represents a deviation compared to the sought attitude. Therefore your goal is to keep the flight director centered, even in turn or in altitude change.
As you will be flying according to your FD it is critical to ensure the correct flight mode is engaged.
Keep in mind that you must always step back from what your FD shows you. It is your responsibility to fly the aircraft first and detect any deviation between your plan of action, the published procedures and the FD.
¶ Representation
¶ Crosshair
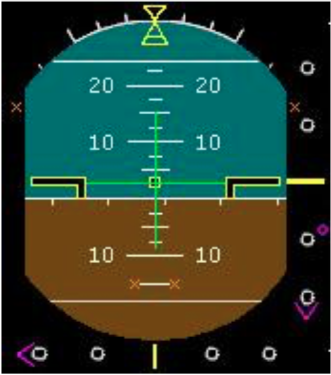
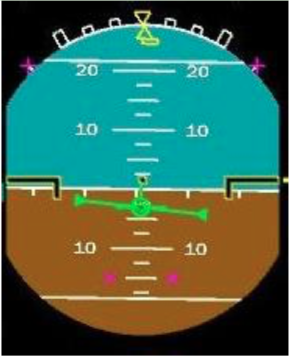
Most operators adopt this kind of representation (here in green). The vertical bar acts for roll deviation and horizontal bar acts for pitch deviation.
¶ V-bars
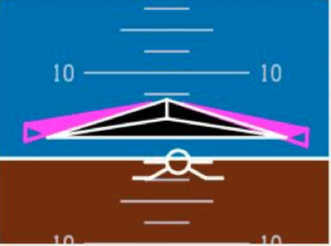
This kind of representation is more common on light jet aircraft because of their instrument manufacturer. The v-bar moves up and down for pitch deviation and rotates for roll deviation (here in magenta).
¶ Flight Path Vector
The FlightPath Vector is a bit different. Contrary to flying a pitch/heading, you will usually fly a slope/track.
Usually, most airlines require that the flight director must be turned off when using the FPV.
¶ Regulations, rules and usage
¶ General regulations
There are not many regulations concerning the flight director.
The most important to be kept in mind concerns the availability of a flight director on commercial aircraft that are operating:
- inside airspaces that require a PBN specification (RNAV10, RNAV5, RNAV/RNP1). The flight director must be switched on when there is no CDI to display the deviation of the route being tracked. Typically it happens in "MAP" mode.
- RNP AR procedures due to RF legs that cannot be flown correctly without instant computations.
In these two cases, losing the flight director must be reported immediately to the ATC and the aircraft will be considered as "Unable RNAV".
¶ Usage
Airlines' standard operating procedures will generally require the flight director to be used at all times. The only exceptions will be:
- Raw data approaches for training purposes
- Visual approaches
Whenever the pilot needs to deviate from the flight director indications for a short time, he shall announce clearly that he deviates and he shall state the reasons leading to do so.
Under no circumstances a pilot shall continue flying ignoring his flight director for a long time. If so, the flight director must be turned off as to avoid any possible confusion.
¶ Autopilot (A/P)
¶ Principle
The autopilot was made to relieve the pilot from hand flying on long flights. Then, with the increase in precision, it was also part of the certification process of high-precision approaches such as ILS CAT III.
Thanks to various servomotors, the autopilot will use the control surfaces in order to fly the aircraft like the pilot would do it. It relies exclusively on the flight modes engaged on the control panel.
Most autopilots require the flight director to be turned on before engaging it.
Again, keep in mind that you must always step back from what your AP does. It is your responsibility to fly the aircraft first and detect any deviation between your plan of action, the published procedures and the AP.
¶ Regulations, rules and usage
¶ General regulations
In addition to the flight director's regulations, three more regulations concerning the availability of the autopilot are to be kept in mind:
- Certification of single-pilot aircraft
- Operations in RVSM airspace
- ILS CAT I/II/III regulations
For more details about these concepts, refer to the appropriate documents.
¶ Certification of single-pilot aircraft
Some aircraft that are certified for single-pilot operations require that the autopilot must be operative in order to perform the flight. That may be due to the complexity to operate some aircraft systems while being able to fly the aircraft manually due to an autopilot failure.
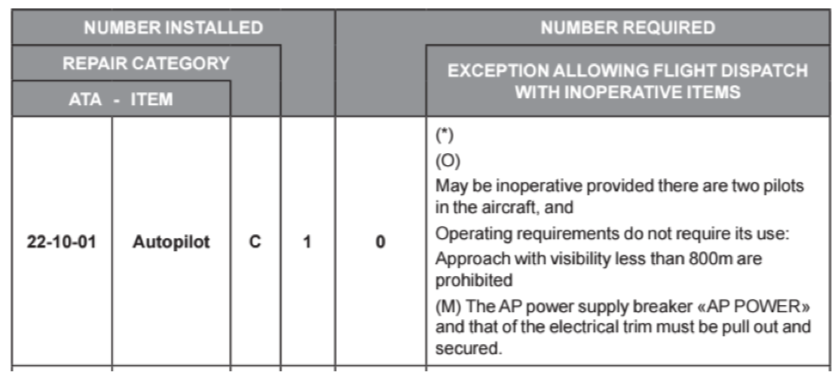
Beechcraft Baron 58 requires the autopilot to be operative before the flight since it is very difficult to operate the landing gear gravity extension lever located on the floor behind the first officer seat while flying the aircraft manually. See below the minimum equipment list extracted from the Baron 58 operating manual.
¶ Operations in RVSM airspace
Operating in RVSM airspace requires a working autopilot at all times.
An autopilot failure leads to the loss of RVSM capability.
¶ ILS CAT I/II/III regulations
Depending on the ILS category, different regulations will apply:
- Cat I: When the RVR is below 800m, autopilot must be engaged in single-pilot operations.
- Cat II: Autopilot must be switched on for the entire duration of the approach until DH.
- Cat III: This category finishes with an autoland which requires the autopilot to be engaged.
¶ Usage
The autopilot must always be used in accordance with the limitations specified in the flight operating manual. Since it may depend on the complexity of the system, it is too specific to be discussed in this document. However some general rules may be kept in mind.
- Most autopilots have a limitation concerning its engagement:
- It must be engaged above a specified height for safety reasons.
- It must be engaged after a specified time following takeoff
Some regulations require the autopilot to be engaged not before 500 feet above ground level. The Airbus A320 autopilot may be engaged not earlier than 5 seconds after takeoff.
- Always know your FMA when flying with the autopilot.
- Autopilot should never be engaged while applying a force on the flight controller.
- Autopilot should be engaged to decrease the workload when the aircraft is in a stable situation.
- Subsequently to a failure, if the autopilot did not disengage automatically and that the failure does not require doing so immediately: do not disconnect the autopilot intentionally.
¶ Auto-speed management
The speed can also be maintained thanks to two systems that can be named autothrottle or autothrust. The main difference between these two systems is the ability to maintain a selected airspeed/mach in cruise which is specific to the autothrottle. The autothrust is normally only able to maintain a specific thrust in order to maintain a specified airspeed which is adapted to climb and descent phases.
Although Airbus calls their system an "autothrust", it works like an autothrottle.
CRJs and ATRs are two aircraft fitted with an autothrust.
¶ Fixed thrust
An aircraft is supposed to:
- Climb using a fixed specific climb thrust
- Descend at fixed idle thrust
In order to maintain the correct airspeed associated with these climb/descent phases, coupled to the autopilot, the aircraft will be able to modify its pitch angle as to maintain the right airspeed.
As a reminder: the more an aircraft pitches up, the more the airspeed decreases.
Warning: while descending, the only way to slow down a turbojet aircraft is to adopt a much higher pitch angle which results in a very slow descent. This must be kept in mind for every deceleration phase.
¶ Variable thrust
If an aircraft cannot modify its pitch angle to maintain a specific airspeed, the only possibility is to modify the thrust of the aircraft. This is due to the use of a specific vertical speed or due to a vertical guidance being tracked.
¶ Go-around
In go-around mode, the aircraft will establish the maximum thrust in order to climb rapidly to a safe altitude. Generally, this mode is coordinated with a go-around pitch angle which allows maintaining the best go- around speed, in regard to the possibility of an engine failure.
¶ Conclusion
Automation is now a modern cockpit standard which is designed as to act on every flight aspects: altitude, heading, speed.
It seems difficult to design an aircraft without autopilot or autothrottle since it helped so much to increase the safety records of the last decades. However, it still represents a danger given the fact that the human understanding or the human trust in these systems can be too high and lead to accidents. These particular accidents have led to the creation of a specific branch in the human factor.
Whatsoever, real airline recurrent simulator trainings are organized as to maintain the manual flying skills of pilots whenever the automation fails or is not adapted to the situation.
- None
- None
- VID 150259 - Creation
- VID 450012 - Wiki Integration
- VID 496402 - Wiki.js integration