¶ Introduction
When flying an aircraft, you must always take into account the possibility of a sudden loss of power/thrust.
The engine failure is a key point in flight safety and a pilot must always be trained such as recover with the available techniques from such a situation.
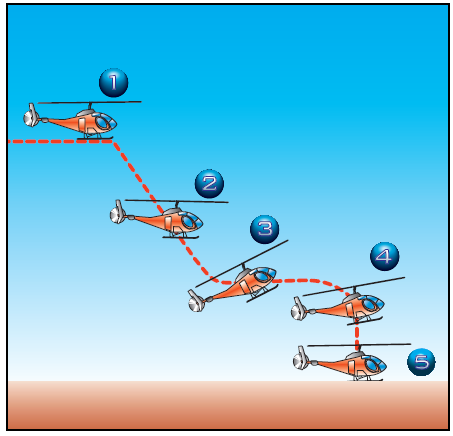
During an autorotation, the engine is no longer supplying power to the main rotor but the pilot can still collect some lift from the rotor.
This is a main engine failure recovery technique for an helicopter before anticipating a forced landing.
In other words, it occurs when the pilot pushes the collective pitch trim totally and the helicopter passes from state 1 with power to state 2 without power.
¶ Induced velocity and power
In autorotation, the reversal of the induced velocity adds power to balance the profile power losses in the rotor, as indicated below:
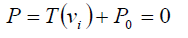
where T(vi) is the induced power and P0 is the profile power. Since the induced velocity is reversed, vi would have a negative sign and the total power is zero. So it confirms the definition.
¶ Aerodynamical considerations
During vertical autorotation, the rotor disk is divided into three regions:
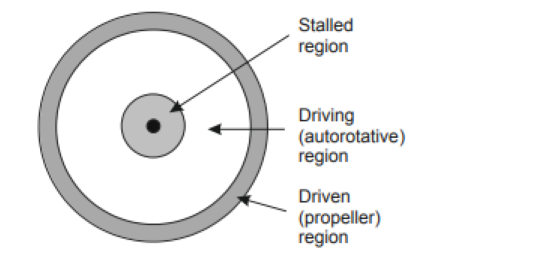
- The driven region: The total aerodynamic force in this region is inclined slightly behind the rotating axis. This results in a drag force which tends to slow the rotation of the blade
- The autorotative region: Total aerodynamic force in this region is inclined slightly forward of the axis of rotation and it accelerates the rotation of the blade
- The stall region: It operates above the stall angle of attack and causes drag which tends to slow the rotation of the blade
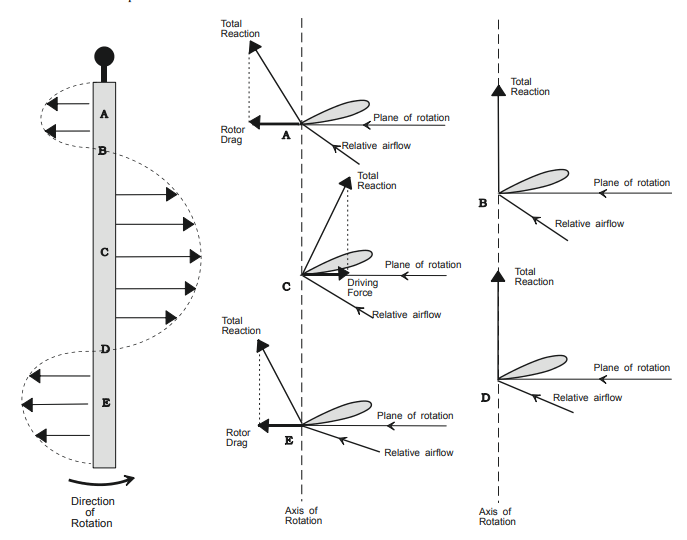
The following scheme shows three blade sections that illustrate force vectors in the driven region A, a region of equilibrium B and the driving region C:
- Introduction To Helicopter Aerodynamics
- Principle of helicopter flight
- Helicopter Aerodynamic - Autorotation
- Bulleted list itemFAA Helicopter Flying Handbook
- FAA Rotorchrafts flying handbook
- VID 514786 - Creation
- VID 496402 - Wiki.js integration