¶ Introduction
The approach controllers have the responsibility of ensuring Air Traffic Control (ATC) Services within a large area named terminal area (TMA).
Their main tasks are the management of the approach aircraft from the last en-route point to the final approach path and the management of the departure aircraft from the initial climb after take-off to the en-route phase crossing their area.
In IVAO, the APP controller shall handle both arrival and departure when he is connected alone with no DEP controller. In some large airports where a departure frequency is published, a DEP controller can open the position in order to take charge of all departures. This will let the APP handle all the arrivals and transit aircraft.
¶ Departure management
¶ Departure procedure
A departure procedure is the route to fly by the aircraft between the initial climb after take-off and the first en-route point.
For the majority of large airports, Standard Instrument Departure procedures (SID) for IFR flights are available and published on departure charts.
For some smaller airports, pilots will fly generally published an omnidirectional departure or an omnidirectional departure issued by air
traffic controllers.
The departure procedures to be followed by any IFR aircraft shall be provided in the IFR clearances given by the controller who is in charge of the ground or delivery position.
¶ SID regulation
When a departing aircraft on a SID is cleared to climb to a level higher than the initially cleared or the level(s) specified in a SID, the aircraft shall follow the published vertical profile of a SID, unless such restrictions are explicitly cancelled by ATC.
The SID departure given by the controller to the aircraft should normally follow its flight plan. Sometimes, the SID can be different due to the specific airfield rules or the traffic congestion. The DEP controller is responsible to deliver the instruction(s) to permit the departing aircraft to join his first en-route fix.
If no SID procedure is published or the pilot requests not to follow a published one, the controller shall issue an omnidirectional departure clearance.
¶ Omnidirectional departure
The content of an omnidirectional departure clearance is determined by the approach controller considering the environmental constraints, the minimum safe altitudes, the radio navigation equipment, the airspace structure and the traffic density. The approach controller will perform coordination tasks with the DEL, GND, DEP and/or TWR controller in order to inform them about his decision on each omnidirectional clearance.
The DEP controller should know the exact omnidirectional clearance given in order to perform his task.
Examples of simple omnidirectional departures:
- After take-off, direct turn towards the first en-route point
- After take-off and passing a cleared altitude (or FL), direct turn towards the first en-route point
- After take-off, initial turn and after passing a cleared altitude (or FL), direct route towards the first en-route point
- After take-off, direct route towards a radio navigation beacon
It is possible for the controller to ask for a more detailed procedure involving more complex manoeuvres:
- Minimum climb rate in ft/min or %
- Interception of a VOR radial or NDB track
- Fly a DME arc
- Fly a track until a given DME distance
¶ Controller tasks during departures
The controller handles departing flights transferred by the TWR between 1000ft ASFC and the CTR boundaries.
Before reaching their cruise altitude, aircraft will perform a climb phase until reaching their first assigned flight level.
The goal of the departure task shall be to ease the climb for each departing aircraft and to avoid level steps whilst ensuring the separation with arrivals continuously:
- It is usual (even in real life) to grant direct routes to departing flights in order to shorten their route and also provide separation.
- It can be possible for the controller to route the aircraft away from the published track in order to fulfil this separation and/or climbing goal by using radar vectoring or by issuing direct to fix clearances.
The recommended separation between two flights having the same departure route and speed is 8NM, whatever their altitude difference is. This separation constitutes a sort of pre-sequencing for theen-route controller (the two aircraft will likely climb at the same initial/transfer level at the same time).
Departures must be quickly separated from arrivals and cleared towards the TMA boundaries before being transferred to the appropriate CTR.
A DEP controller shall never have any doubt about the actual and future separation during the whole climb phase. Separation must be strictly ensured at any moment and shall be adapted to the needs of the APP controller whose regulation tasks are tricky.
During this climb, aircraft can cross several flight levels. Controllers shall be aware that those flight levels can be used for another aircraft for cruise (IFR or VFR).
¶ Climb phase management
In the case of serious difficulties in managing the separation between departures and arrivals (potential or real conflicts), the controller may assign altitudes, climb rates and speeds:
- Assign a higher speed and/or a lower climb rate
- Assign a lower speed and/or a higher climb rate
- Ask the pilot to maintain a given climb rate (minimum or maximum)
- Ask the pilot to maintain a given flight level (to undercross arrivals)
- Ask for a speed (IAS) decrease or increase
To avoid potential conflicts and optimize departure trajectories the DEP controller may also assign headings (also to avoid maintaining an aircraft at a low flight level when the pilot wishes to climb to the cruise level):
- Grant direct routes
- Provide radar vectoring
¶ Separation minima during departure
The Departure controller shall at any time:
- Ensure safety for each aircraft with respect to aircraft performance and minimum separation between all aircraft at any time (whether they are totally or partially under his control)
- Not give any altitude clearance below minimum safety altitudes i.e. MRVA for Minimum Radar Vectoring Altitude or MSA Minimum Sector Altitude where they are applicable to prevent any potential terrain collision
- Prevent any potential terrain collision
¶ Separation definition and concerned traffic
Two aircraft controlled under traffic separation conditions are considered clear of conflict if they are separated horizontally or vertically by a distance in accordance with the separation minima (whether they are handled or not by the same ATC).
As established by ICAO regulation, traffic separation must be provided:
- for all flights in class A and B airspaces
- for IFR and SVFR from each other and from VFR in class C airspace
- for all IFR and SVFR from other IFR/SVFR in class D and E airspaces
The separation conditions applied to night VFR (NVFR) depend on the country. NVFR might be treated as SVFR or normal VFR depending on the local regulations.
Flights under VFR conditions in class C, D, E and F airspaces are not separated from IFR traffic and are required to ensure their separation by the "see and avoid" rule after they have received adequate traffic information.
¶ Radar separation minima for IFR
The minimal vertical separation within the terminal control area is:
- 1000ft over the whole approach and departure procedure
The minimal horizontal separation within the terminal control area is:
- 5NM
- 3NM when reduced approach separation is applicable to the TMA area.
A minimum horizontal radar separation of 3NM may be kept over the whole approach or departure procedure according to national or division rules.
If the controller provides only procedural departures without considering that IVAO ATC software is a radar system where the radar vectoring is possible, the controller shall apply non-radar timed base separation. (Consult available document about non radar separation).
¶ Wake turbulence category impact on separation
A separation higher than the general minimum is mandatory for some aircraft depending on their wake turbulence category. The separation minima applicable for a controller using radar are:
| Succeeding Aircraft | behind | preceding aircraft | Separation minima |
|---|---|---|---|
| Heavy | behind | Heavy | 4 NM |
| Medium | behind | Heavy | 5 NM |
| Light | behind | Heavy | 6 NM |
| Light | behind | Medium | 5 NM |
| Heavy | behind | A380 | 6 NM |
| Medium | behind | A380 | 7 NM |
| Light | behind | A380 | 8 NM |
If the controller provides procedural departure only without considering that IVAO ATC software is a radar system where the radar vectoring is possible, the controller shall apply wake turbulence timed base separation. (Consult available document about wake turbulence separation)
¶ Loss of separation
A conflict is an event in which two or more aircraft experience a loss of minimum separation.
However, the separation minima are set for risk mitigation and therefore it is essential to a controller's job to prevent this situation from occurring.
The controller shall not issue any clearance implying a separation reduction below minima. A clearance presenting a potential risk of separation loss is considered as an ATC fault.
Example of clearance presenting a potential risk of separation loss (=ATC fault): 2 aircraft cleared to the same point with the same climb clearance with approximately the same estimated time.
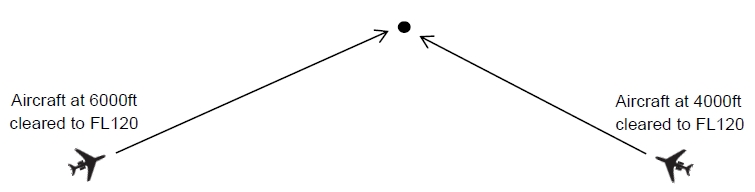
The controller is responsible for the separation of all aircraft under his control from all other aircraft, whether they are under his control or not.
¶ Management by flight level steps
The simplest method to ensure safety is the management by flight level steps.
This method should be applied by new DEP controllers who have difficulties to ensure and measure the separation quality. This method works well but it is not optimized.
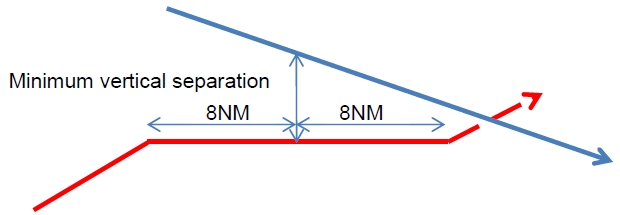
When two or more aircraft should potentially cross the same flight level with a horizontal regulation separation smaller than 8 NM within a controlled airspace with radar assistance, the ATC shall stop the lower aircraft climbing and provide a least the minimum vertical separation between those aircraft until the horizontal separation is above the requested regulation separation of 8NM or minimum separation.
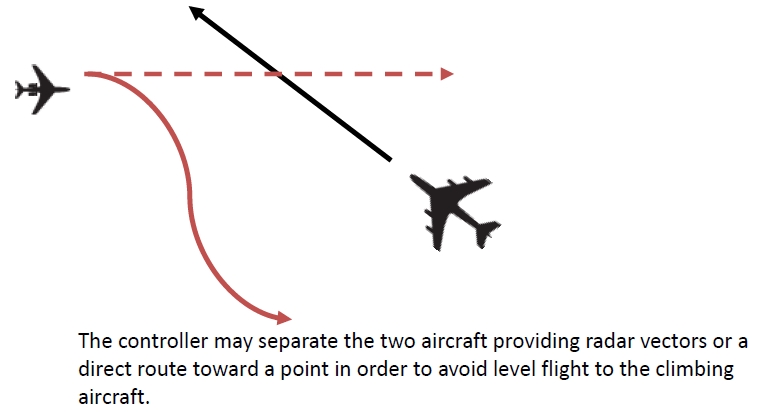
¶ Management by heading modification
In order to make an aircraft reach its cruise level, the controller can provide radar vectors to the detriment of the trajectory where climb or descent has priority on the trajectory to avoid conflicts with other aircraft on converging trajectories.
In almost all cases, the aircraft climbing without level flight steps will gain with respect to a low level flight step, even though its trajectory is longer.
The minimum lateral or vertical separation between the two aircraft shall be respected in all cases.
¶ Management using offset parallel route
Let's consider the case of a climbing aircraft having another aircraft in front of him on the same trajectory, at a higher level and at much lower speed. A possible method is the use of offset parallel route.
Offset parallel route is a procedure used for aircraft navigating an assigned route along an airway or between published navigational fixes by adjusting their course to parallel the assigned route either minimum 10NM (twice the minimum separation distance) to the right or to the left of the initial route centreline or current aircraft track.
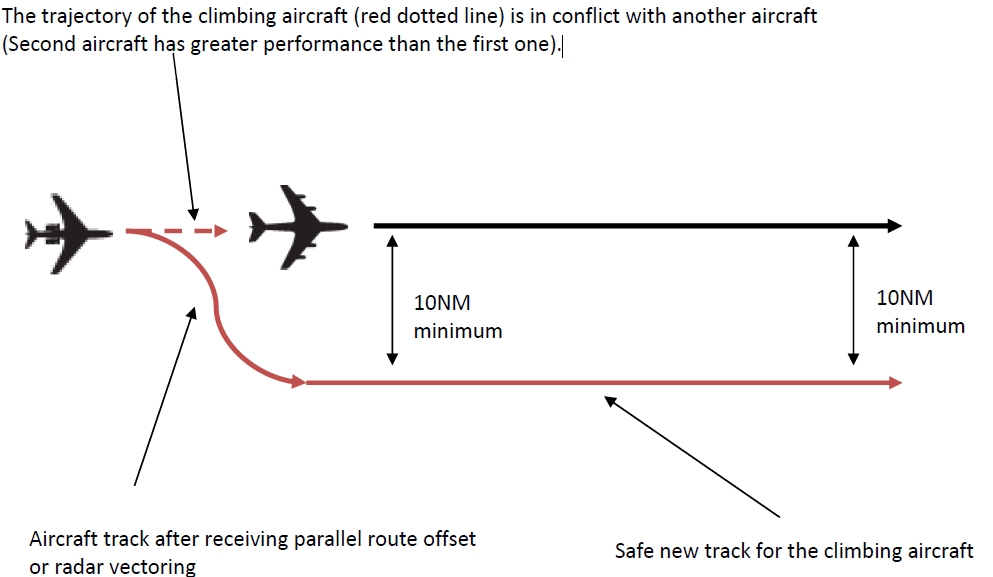
In order to respect horizontal separation in all cases and to be in accordance with the rules of the air, the air traffic controller should use a right offset parallel route, except if a left side has more advantages for the air traffic controller to ensure traffic separation and/or to create optimal flow of traffic.
This method offers several advantages:
- It allows aircraft to overtake another by following the same route sharing the same flight level whilst ensuring the needs of lateral separation
- It allows aircraft to overtake another when climbing or descending through a conflicting flight level with another levelled aircraft whilst ensuring the needs of lateral separation
The disadvantage of this method is the pilot capacity to perform this type of operation. The pilot shall have a flight management computer with this function implemented and RNAV capacity.
¶ Use of Radar
Typical distance between vectored aircraft depends on the runway capabilities, the navigation equipment used during the procedure, the weather and/or the airport configuration.
¶ Why the use of radar vectoring
During increased traffic at the airport, radar vectoring becomes the standard procedure in most of the large airports to arrange aircraft in sequence to ensure air traffic flow management for the most efficient use of airspace. Radar vectoring procedure shall be used by air traffic controller only for identified aircraft on radar system.
Radar vectoring can be used by the ATC as a complementary tool in order to enhance:
- The optimisation of departing aircraft climb inside or outside an arrival flow
- The climbing regulation in complex situations when classical management is failing
- The assistance to pilots in emergency or pan
- The assistance to lost pilots or deviating pilots from their cleared track
- Other cases where the situation needs it like specific pilot request, pilot off-track...
Whenever the ATC provides radar vectoring, ATC shall not take any risks regarding:
- The aircraft safety: vectoring near mountainous areas or high landmarks where vertical obstacle clearance should be infringed, descent clearance with ground proximity warning, vectoring in areas below MRVA or MVA outside the published approach path
- The aircraft separation: vectoring with an immediate or future effect of a reduction of separation between traffic under minima. He must ensure that a suitable separation is kept every time after he issues a clearance.
¶ Where radar vectoring can be used?
Radar vectoring can be used inside controlled airspace where air traffic control service is provided:
Radar vectoring should not be provided to aircraft which do not have to be separated due to airspace class (example VFR traffic in airspace class C or below), except for emergency and pilot assistance.
The use of radar vectoring procedure can be forbidden on some airfields for the following reasons:
- Regulation of your country/division cannot permit it on your airfield or all airfields
- Due to the proximity of mountainous, prohibited, restricted (military) areas, radar vectoring can be restricted or forbidden
- Approach paths are below minimum radar vectoring altitudes (MVA or MRVA) in the considered sector if they are published
- Approach and arrival paths are below minimum sector altitude (MSA) where minimum radar vectoring altitudes are not published on charts. (IVAO)
In smaller airports or airports in mountainous areas, the approach controller might provide procedural control (published procedures) only or partially.
- None
- None
- VID 150259 - Creation
- VID 200696 - Update
- VID 531824 - Wiki Integration
- VID 496402 - Wiki.js integration