¶ Introduction
RNAV is defined as "a method of navigation which permits aircraft operation on any desired flight path within the coverage of station-referenced navigation aids or within the limits of the capability of self-contained aids, or a combination of these." This removes the restriction imposed on conventional routes and procedures where the aircraft must overfly referenced navigation aids, thereby permitting operational flexibility and efficiency.
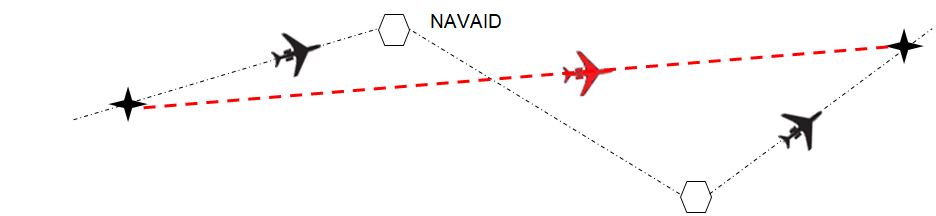
Figure: Red path is area navigation, black path is conventional navigation.
The position of the aircraft is known using various sensors that can compute its position. RNAV can then be summed up as the ability of one aircraft to navigate, computing change of tracks from one point to another, using only coordinates.
The RNAV system may also be connected with other systems, such as auto-throttle and autopilot/flight director, allowing more automated flight operation and performance management. Despite the differences in architecture and equipment, the basic types of functions contained in the RNAV equipment are common.
Fly-by turns are a key characteristic of an RNAV flight path. The RNAV system uses information on aircraft speed, bank angle, wind, and track angle change, to calculate a flight path turn that smoothly transitions from one path segment to the next.
¶ Instruments
¶ GNSS Receiver
A GNSS receiver is a system capable of interpreting GNSS signals as to position an aircraft and compute a flightpath. It obviously has precise requirements in terms of functionality.
Case study: Garmin GNS430W
We will study some basic functions and requirements of a GNSS receiver using the Garmin GNS430 depicted in Flight Simulator as the default GPS.
Flight Simulator representation of GNS430 is a much simpler version of the real one. Some requirements and features explained hereafter may not be implemented.
For an accurate GNS 430/530 with LPV support (WAAS), refer to Reality XP addon. You may also use the official Garmin trainer version available on their website.
¶ Connection between GNSS receiver and Navigation instrument (HSI/CDI)
Using the Garmin self-test page, we will define further concepts

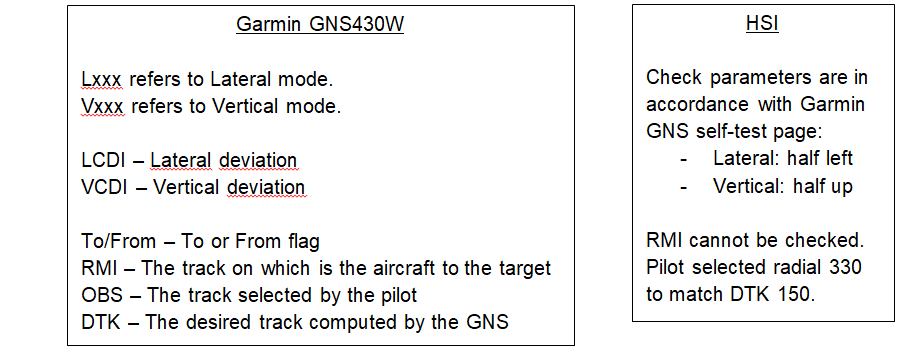
Advanced eHSI synchronize OBS and DTK.
Else, the pilot should synchronize it when passing a waypoint for a correct situational awareness.
¶ Non-approach navigation

From left to right, and up to bottom:
- TERM: Current mode in which the GPS is operating
- 1.0: Current RNAV performance associated to current mode
- Lateral deviation in regard to desired track (DTK)
- RMI
¶ Approach navigation
From left to right, and up to bottom:
- Approach mode (LPV, LNAV, L/VNAV, ...)
- 0.4: Performance reducing linearly during approach phase from 1NM to 0.3/0.1NM
- FA: Final Approach Fix (specific procedure point: FAF, IAF, MAPt ...)
- Vertical guidance and deviation
¶ Regulations
According to ICAO standards and recommendation, the following mode changes should be applied:
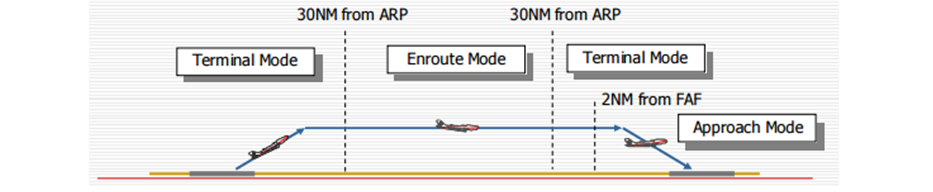
Following specifications are required for each mode:
- Enroute (RNAV-5)
- RAIM Alert Limit (IMAL): 2.0NM
- CDI Sensitivity: 5.0NM
- Terminal (RNAV-1)
- RAIM Alert Limit (IMAL): 1.0NM
- CDI Sensitivity: 1.0NM
- Approach (RNP APCH)
- RAIM Alert Limit (IMAL): 0.3NM
- CDI Sensitivity : up to 0.1NM for LPV, 0.3NM for overlay and LNAV(+V).
¶ Control Display Unit & Navigation Display
In sophisticated modern jet airliners, instead of GNS such as those provided by Garmin, the manufacturer has integrated a much more complex and complete system: a control display unit.
CDU will provide all the information computed by the Flight Management Systems (FMS), relying on input provided by Attitude & Horizontal Reference Systems (AHRS), navigation sensors, and the pilot. The display will be mainly integrated into a Navigation Display.
Case study: Boeing 737NG
This documentation is only intended to review pages of the Boeing 737NG CDU in relation with RNAV.
¶ Initial Positioning
On a Boeing 737NG, the aircraft obtains its position generally by using all available sensors (except for LORAN). When powering up the aircraft, the pilot must insert/confirm position to initialize IRS. This input is made in the FMC but the mechanical device present on oldies is still completely integrated.

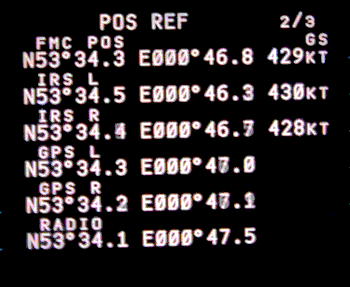
¶ Position Update
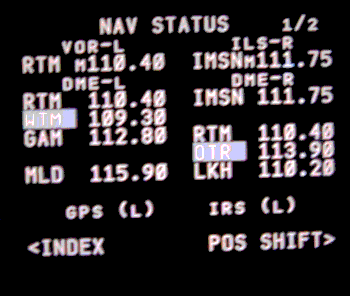
Various pages of the FMC display position computation according to each sensor
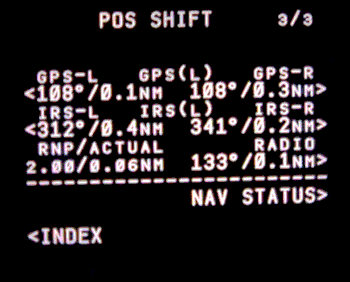
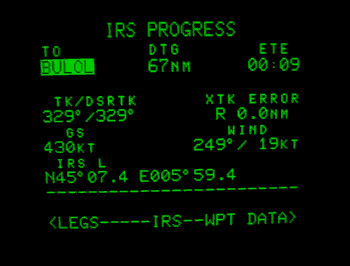
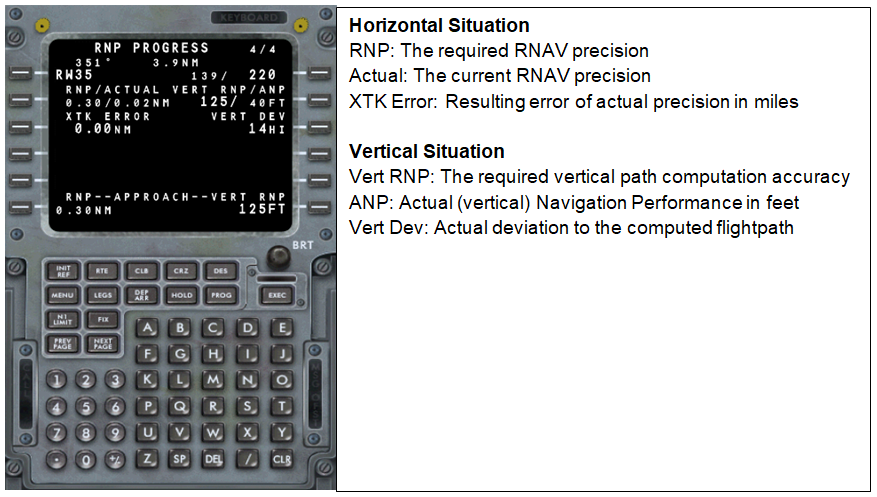
¶ Conduct of RNAV operations
Comparatively to Garmin, the FMC can display Required Navigation Performance
¶ Flight Information Display
PFD and ND will display the same information to the pilot, including graphical representations.

¶ Conventional Turns
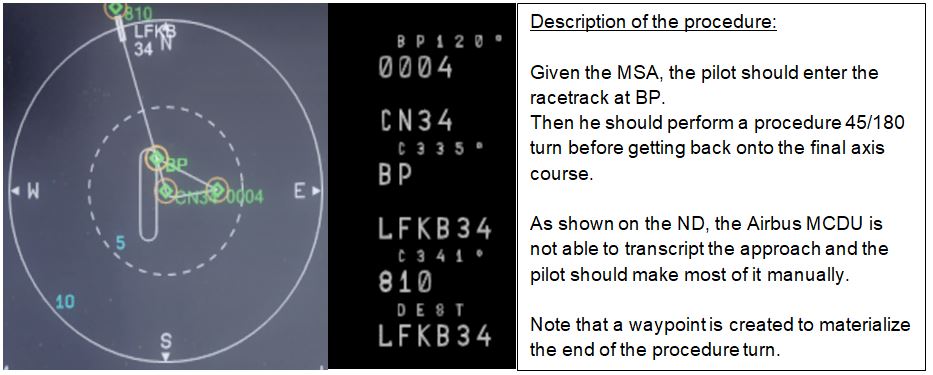
Due to the nature of procedures based on conventional means, some coding will lead to discontinuities in particular when using less elaborate systems.
Under no circumstances should a pilot rely on FMC/GPS rather than on published charts. If you notice a discontinuity or a difference with the published flightpath, the aircraft should be manned as to fly the right flightpath.
Special attention should be paid when flying procedures including:
- Racetracks
- Track to intercept a fix radial
- Timed base turns
- Procedure 45/180 and 80/260 turns
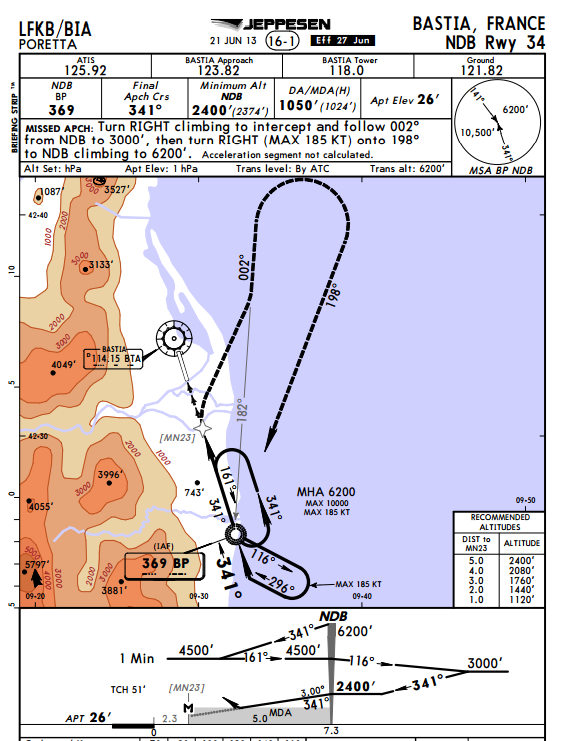
Case study: Bastia LFKB -- NDB RUNWAY 34
¶ RNAV flight: do-lists, checklists and briefings
This part of the documentation is intended to provide the key actions that should be associated to flying RNAV, in particular emphasizing the difference with an aircraft flying purely conventional.
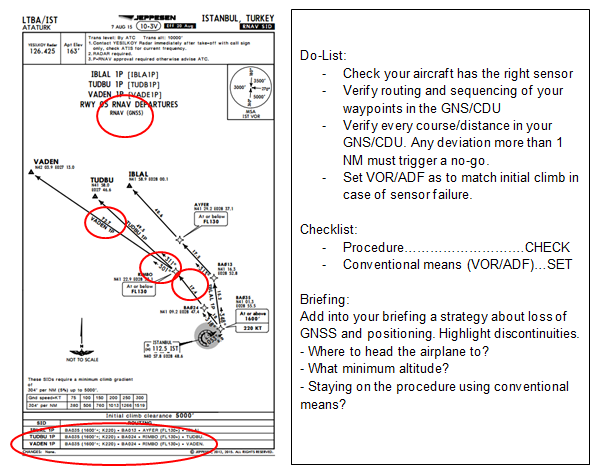
Example flight: Istanbul LTBA -- Sofia LBSF
- Route: VADEN T227 DEDIN
- SID: VADEN 1P
- STAR: DEDIN 1D
- APP: RNAV (GNSS) RWY09
¶ Preflight
The only additional item to be taken into account when planning to fly RNAV, is to make sure that the GNSS cover will be complete during your flight.
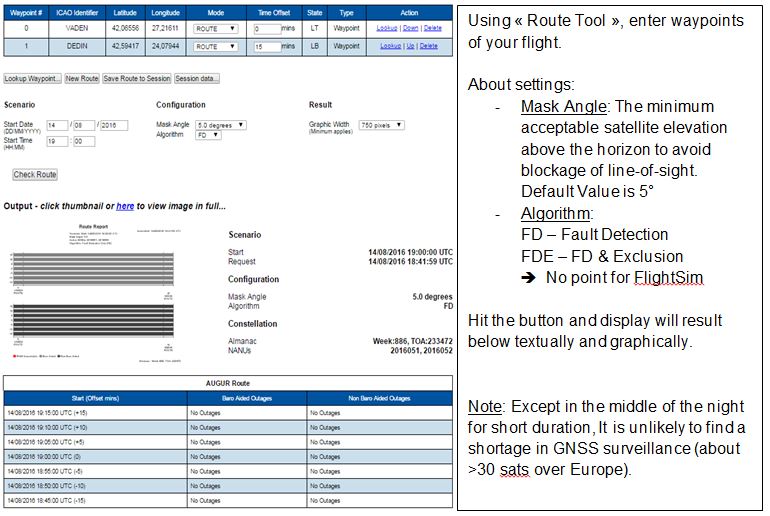
This can be done in Europe by using the AUGUR RAIM Prediction Tool: http://augur2.ecacnav.com/
Remember! RAIM is required before beginning any RNAV approach. The only case in which this check is not needed is if your aircraft is SBAS-equipped.
You will need to check the availability of the GNSS signal for:
- your route using "Route Tool"
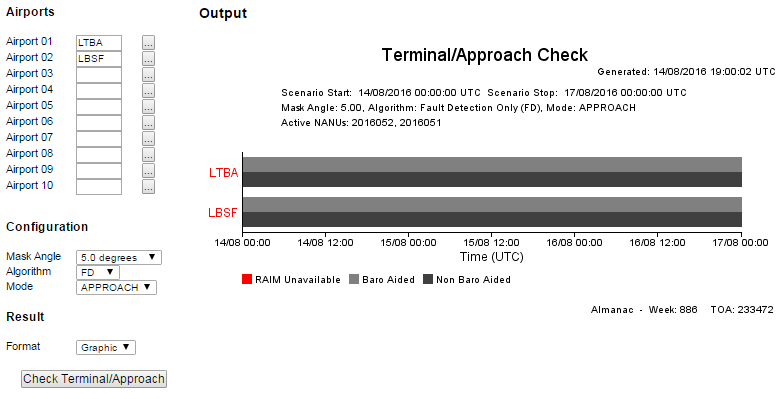
- your terminal area using "Terminal/Approach Tool"
Route check:
Same with « Terminal/Approach Tool »
¶ Departure
¶ Arrival
Apply same process as the departure.
¶ Approach
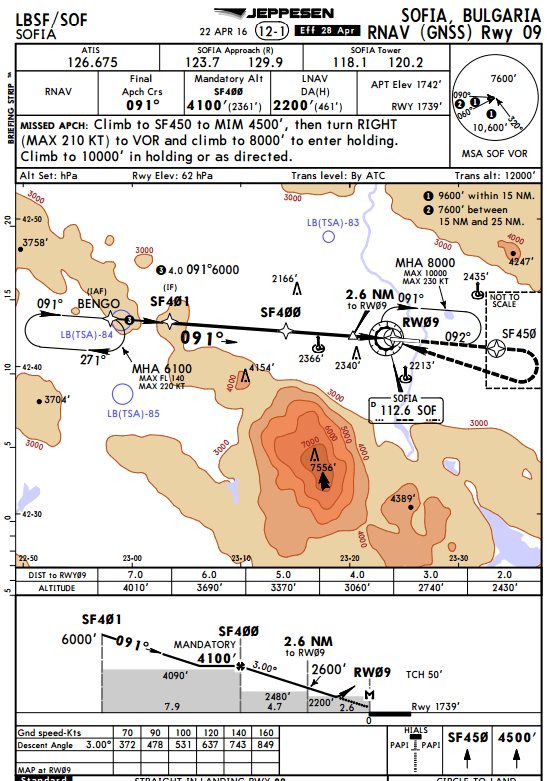
Do-List:
- Perform same tasks as for departure/arrivals. Clearly identify discontinuities, particularly for Overlay
- Verify altitude constraint.
- Perform RAIM Prediction if not done on ground.
Checklist:
- Procedure..........CHECK
- Conventional means (VOR/ADF).....SET
- RAIM.....Operative and available
Briefing: Add into your briefing a strategy about loss of GNSS and positioning. Highlight discontinuities.
Loss of GNSS is considered as an emergency!
¶ Conclusion
RNAV is a brilliant navigation method to optimize traffic flow using the power of GNSS even though it implies tons of new rules, standards and recommendations to implement for all actors of the aviation industry.
However the future is already marching on, as the evolution of RNAV is already being developed and enhanced: the Required Navigation Performance (RNP)
- None
- None
- VID 200696 - Creation
- VID 256292 - Wiki Integration
- VID 497664 & 496402 - Wiki.js integration