¶ Foreword
This page will deal with NDB approaches in four different ways:
- NDB without DME using non-RNAV and RNAV overlay
- NDB with DME using non-RNAV and RNAV overlay
Use the table of content accordingly to jump to a specific section.
¶ Flightpath management
¶ Lateral flightpath
NDB approaches are based on remaining on a constant NDB track.
The lateral flightpath will be monitored using an ADF(or RMI) when flying conventional instruments.
Instruments using RNAV positioning call allow use of crosstrack deviation to monitor lateral position.
Suggested lateral tolerance for NDB approach is 10°
NDB approach is a non-precision approach, most NDB approaches will not lead to be aligned with runway centerline at minima, this is perfectly normal and remaining distance and altitude should be sufficient to visually acquire a stabilized final.
¶ Vertical flightpath
NDB does not provide any distance measurement.
An NDB approach was done flying at a constant speed to time the duration of the final approach descent.
Altitude shall be checked every 30 seconds to confirm vertical position of the aircraft in relation to safety altitudes and remaining distance to the runway.
Some NDB approaches were then upgraded with a DME, allowing precise positioning of the aircraft.
Latest RNAV-based instruments can emulate a vertical deviation indicator for a calculated glideslope.
Without DME, we will learn how to calculate our own descent profile and monitor it during the approach.
With DME, monitoring is pretty straight-forward.
Suggested vertical deviation tolerance is 300ft.
¶ NDB approach without DME
¶ Preparatory work
¶ Chart reading
Approach will be LOWW NDB RWY29
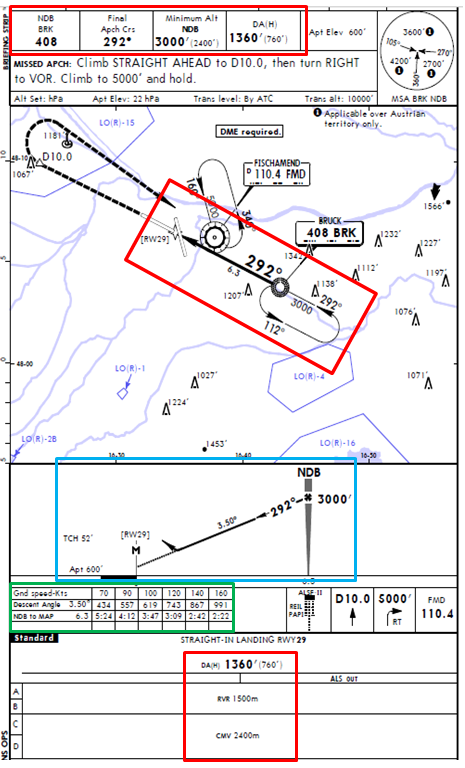
- NDB Identification: BRK
- NDB Frequency: 408 kHz
- Final Approach Course: 292°
- Minima: Cat C - MDA 1360 / MDH 760
- Required Visibility: Cat C -- CMV -- 2400m
¶ Required calculations
According to the charts, final approach descent is on a 3.50° path.
Rate of descent will be around 960fpm.
Since we will be monitoring descent every 30 seconds, altitude to lose every check is 480ft.
Minima are expected to be reached after 1 minute and 42 seconds.
Procedure missed approach point (MAP) is also time-determined, at a distance of 6.3nm from the NDB.
Go-around (if required) will be initiated after 2 minutes and 30 seconds.
| Elapsed Time | 00:00 | 00:30 | 01:00 | 01:30 | 02:00 | 02:30 |
|---|---|---|---|---|---|---|
| Altitude | 3000 | 2520 | 2040 | 1560 | 1080 (if RWY in sight) |
600 (if RWY in sight) |
Vertical profile must be in accordance with safety altitude and step-down fixes.
Altitude below minima is only for guidance and descent without runway visual references is prohibited
¶ Conventional instruments
¶ Before the NDB
Initial approach segment or radar vectoring will lead to be established at least 30 seconds before descent.

1.⠀Aircraft is in approach configuration
2.⠀3000ft on radial 112° BRK
3.⠀Final approach speed
4.⠀RadioAids set and identified
5.⠀Mimima reference set
Aircraft at 3000 feet, established on radial 112 inbound of BRK NDB, speed is Vref=149 kts.
Speed is a critical constant, approach speed must be reached and stabilized before beginning of descent.
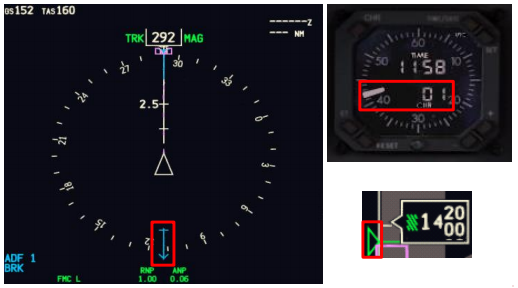
¶ Passing the NDB

When passing BRK NDB :
1.⠀Timer must be started precisely
2.⠀Initiate descent, pitch variation must be 3.50° corrected for wind
3.⠀Adjust thrust, maintain speed constant
4.⠀Check vertical rate
¶ After the NDB
During descent:
1. Monitor elapsed time
2. Each 30 seconds, check altitude. Apply corrective actions if required.

Example: at 1 minute
Altitude: 2180 feet,
Calculated altitude: 2040 feet,
Altitude deviation: +140 feet.
Pitch correction is 1° per 100 feet, until next check
We will induce a -1° pitch change
¶ Approaching minima

Approaching minima:
1. Stand ready to disengage autopilot if engaged.
2. Check timer is around expected elapsed time
3. Verify visual references are acquired
Under no circumstance descent should be continued below MDA without visual.
As missed approach point (MAP) is not at the end of our descent, wait before going-around by stopping the descent at MDA.
PAPI is indicating we are too high.
Pay attention to the fact that RWY29 PAPI is set for a 3.00° glideslope
After disconnecting A/P, land visually.
¶ RNAV Overlay
The use of modern instruments coupled with RNAV positioning enables the possibility to fly non-precision approaches with a precision reducing during the approach from 1NM up to 0.1NM laterally.
Lateral position is monitored by use of crosstrack deviation -- LNAV method.
Vertical position is monitored by computed vertical deviation -- VNAV method.
Main point for using RNAV instead of conventional techniques is:
- Continuous Descent from Final Approach fix (known as CDFA).
- Distance measurement allowing more precision in monitoring descent profile such as LOC, VORDME.
- Mapping of important waypoints: missed approach point, step down fixes, final approach fix
Some countries regulations allow using RNAV Overlay to convert non-CDFA procedure MDA into CDFA procedure DA but require adding a margin to the flightpath.
For example, France requires adding 40ft for Cat C aircrafts.
For example, when we consider this approach:
- Final approach fix: BRK
- Step down fix: None
- Missed approach point: RW29
It can be interesting to determine distance checkpoint based on RW29:
| Dist to RWY29 | 6.1 | 5.0 | 4.0 | 3.0 | 2.0 | 1.0 |
|---|---|---|---|---|---|---|
| Altitude | 3000 | 2590 | 2220 | 1850 | 1480 (if RWY in sight) |
1110 (if RWY in sight) |
Altitude to be lost per NM is determined by dividing ROD at GS=120 divided by 2.
ROD at GS=120 is 743fpm, and then altitude to be lost per NM is 370 feet.
¶ NDB approach with DME
¶ Preparatory work
¶ Chart reading
Approach will be LOWW NDB RWY11
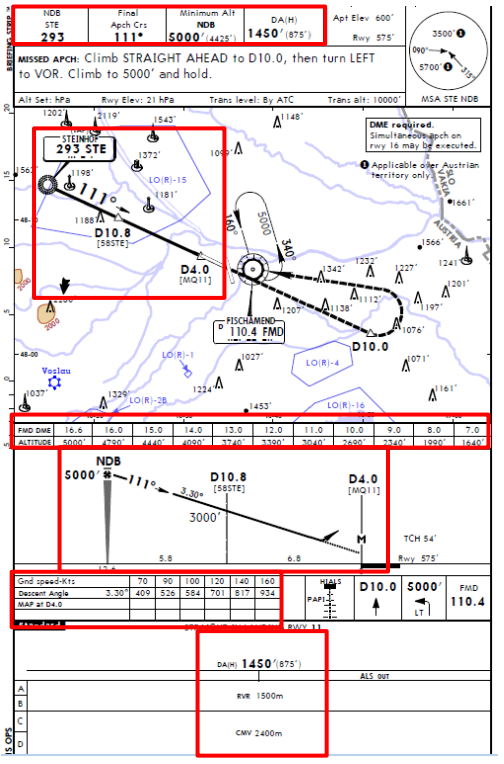
- NDB Identification: STE
- NDB Frequency: 293 kHz
- Final Approach Course: 111°
- Minima: Cat C - MDA 1450 / MDH 875 - Required Visibility: Cat C – CMV 2400m
- DME: FMD 110.40
¶ Required calculations
According to the charts, final approach descent is on a 3.30° path.
Rate of descent will be around 880fpm.
Vertical profile will be monitored using DME distance and attached table on the chart.
Minima are expected to be reached at FMD-D6.7NM.
Procedure missed approach point (MAP) is also determined in regard to FMD DME at D4.0.
One step down fix is at D10.8 with altitude 3000 feet.
¶ Conventional instruments
¶ Before the NDB
Initial approach segment or radar vectoring will lead to be established at least 30 seconds before descent.

1.⠀Aircraft is in approach configuration
2.⠀5000ft on radial 291° STE inbound
3.⠀Final approach speed
4.⠀RadioAids set and identified
5.⠀Mimima reference set
Aircraft at 5000 feet, established on radial 291° inbound of STE NDB, speed is Vref=149 kts.
Speed is a critical constant, approach speed must be reached and stabilized before beginning of descent.
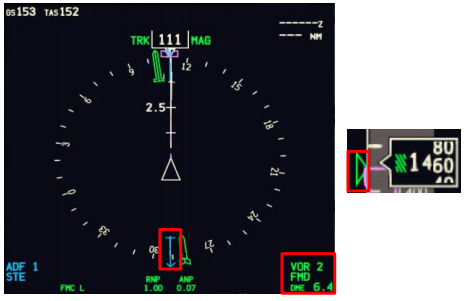
¶ Passing the NDB

When passing STE NDB :
1.⠀Initiate descent, pitch variation must be 3.30° corrected for wind
2.⠀Adjust thrust, maintain speed constant
3.⠀Check vertical rate
¶ After the NDB
During descent:
1.⠀Monitor DME distance
2.⠀Each NM, check altitude. Apply corrective actions if required

Example: At D13
Altitude: 3720 feet,
Calculated altitude: 3740 feet,
Altitude deviation: -20 feet.No pitch change to be made
As reference, pitch correction is 1° per 100 feet, until next check
¶ Approaching minima

Aircraft is not on runway centerline, this is perfectly normal.
Approaching minima:
1.⠀Stand ready to disengage autopilot if engaged.
2.⠀Check DME is around expected distance
3.⠀Verify visual references are acquired
Under no circumstance descent should be continued below MDA without visual.
As missed approach point (MAP) is not at the end of our descent, wait before going-around by stopping the descent at MDA.
PAPI is indicating we are too high
Pay attention to the fact that RWY11 PAPI is set for a 3.00° glideslope.
After disconnecting A/P, land visually
¶ RNAV Overlay
For example, when we consider this approach:
- Final approach fix: STE
- Step down fix: 58STE
- Missed approach point: MQ11
It can be interesting to determine distance checkpoint based on 58STE and MQ11:
| Dist to 58STE | 5.0 | 4.0 | 3.0 | 2.0 | 1.0 | 58STE |
|---|---|---|---|---|---|---|
| Altitude | 4750 | 4400 | 4050 | 3700 | 3350 | 3000 |
| Dist to MQ11 | 6.0 | 5.0 | 4.0 | 3.0 | 2.0 | 1.0 |
|---|---|---|---|---|---|---|
| Altitude | 2650 | 2300 | 1950 | 1600 | 1250 (if RWY in sight) |
900 (if RWY in sight) |
Altitude to be lost per NM is determined by dividing ROD at GS=120 divided by 2.
ROD at GS=120 is 701fpm, and then altitude to be lost per NM is 350 feet.
See below mapping of this approach on ND:

Note that computed runway centerline in dashed white line is not on the magenta line showing that the radial is not aligned with the runway. This is normal.
- None
- VID 200696 - Creation
- VID 497664 & 496402 - Wiki.js integration