¶ Introduction
The TCAS or Traffic alert and Collision Avoidance System is a system designed to reduce the incidence of mid-air collisions with other aircraft.
The TCAS is independent of air traffic control and flight navigation instruments.
Over the years, air traffic has continued to grow. The introduction of modern aircraft traffic control systems made it possible to cope with this growth, while maintaining the required level of flight safety. However, the danger mid-air collisions still persist. Therefore, the development of effective airborne collision avoidance systems for aircraft in the air has been the goal of aviation specialists from many countries.
¶ ICAO regulation
¶ Definition and rules
Airborne collision avoidance system or ACAS is an aircraft system based on secondary surveillance radar (SSR) transponder signals which operate independently of ground-based equipment to provide advice to the pilot on potential conflicting aircraft that are equipped with SSR transponders.
The International Civil Aviation Organization prescribes that an Airborne Collision Avoidance System (ACAS) must be installed and operational for all aircraft heavier than 5700 Kg and all aircraft authorized to transport more than 19 passengers.
¶ Types of ACAS
- ACAS I gives Traffic Advisories (TAs) but does not recommend any manoeuvres. The only implementation of the ACAS I concept is TCAS I. These equipments are limited to interoperability and interference issues with ACAS II.
- ACAS II gives Traffic Advisories (TAs) and Resolution Advisories (RAs) in the vertical sense (direction). The only implementations of the ACAS II concept are TCAS II Version 7.0 and Version 7.1.
- ACAS III gives TAs and RAs in vertical and/or horizontal directions. ICAO SARPs for ACAS III have not been developed. Currently, there are no plans to proceed with such a development
Not all TCAS systems can be considered as accepted ACAS.
TCAS I is mandated in the United States for certain smaller aircraft.
TCAS II Versions 7.0 and 7.1 are mandated in Europe and elsewhere Collision avoidance systems can be passive, like for example the PCAS or Portable Collision Avoidance System which only monitors the surrounding aircraft without emitting any signal. This portable system is often used within General Aviation.
Some gliders are now equipted with an avoidance system named FLARM.
FLARM is particularly popular among glider pilots and is often used in conjunction with other collision avoidance systems such as ADS-B. The system is designed to improve safety in the air and reduce the risk of mid-air collisions, which can be particularly dangerous for smaller aircraft. While FLARM is not yet mandatory in all aircraft, many pilots choose to use it as an additional safety measure.
¶ ACAS II as a standard
Currently, the only commercially available implementations of ICAO standard for ACAS II (Airborne Collision Avoidance System) are TCAS II versions 7.0 and version 7.1 (Traffic alert and Collision Avoidance System).
ACAS II is an aircraft system based on Secondary Surveillance Radar (SSR) transponder signals.
ACAS II interrogates the Mode C and Mode S transponders of nearby aircraft (‘intruders’) and from the replies tracks their altitude and range and issues alerts to the pilots, as appropriate.
ACAS II works independently of the aircraft navigation, flight management systems, and Air Traffic Control (ATC) ground systems.
Non-transponding aircraft are not detected.
¶ TCAS instrument onboard
The TCAS system can be implemented as:
- a dedicated instrument
- a combined instrument with the vertical speed indicator
- a combined instrument with the Navigation Display or the Electronic Horizontal Situation Indicator

¶ Different modes
TCAS can be currently operated in the following modes:
- Standby: TCAS does not issue any interrogations and the transponder only replies to discrete interrogations. This mode is used on the ground, outside of the runway.
- Transponder: the transponder replies to all appropriate ground and TCAS interrogations and TCAS remains in stand-by. This is a passive mode which is the minimum mandatory mode to be set by any airborne aircraft (typically in General Aviation)
- Traffic Advisory (TA): TCAS issues the appropriate interrogations and perform all tracking functions. However, TCAS will only provide traffic advisories (TA) and the resolution advisories (RA) are inhibited
- Automatic (TA/RA): TCAS provides traffic advisories (TA) and resolution advisories (RA) when appropriate. This mode is mandatory for all Commercial Aviation aircrafts.
¶ Technical description
The TCAS II is a system that:
- Monitors the airspace around the aircraft and communicates with all traffic equipped with a corresponding active transponder
- Queries all surrounding aircraft on the frequency 1030 MHz and each aircraft transponder replies on the frequency 1090MHz
- Warns pilots of the presence of other transponder-equipped aircraft which may present a threat of mid-air collision (MAC)
TCAS is only able to interact with aircraft that have a correctly operating mode C or mode S transponder.
¶ Definition
TCAS II equipment provides two types of advisories to pilots: Resolution Advisories (RAs) and Traffic Advisories (TAs).
These are defined as follows:
- Resolution advisory (RA) is an indication given to the flight crew recommending:
- a manoeuvre intended to provide separation from all threats, or
- a manoeuvre restriction intended to maintain existing separation.
- Traffic advisory (TA) is an indication given to the flight crew that a certain intruder is a potential threat.
¶ Protection volume
A protected volume of airspace surrounds each ACAS II equipped aircraft. The size of the protected volume depends on :
- the altitude of the aircraft involved in the encounter.
- the speed of the aircraft involved in the encounter.
- the heading of the aircraft involved in the encounter.
The TCAS system builds a three dimensional map (Protection Volume) of the airspace around the aircraft. The map range depends on the TCAS configuration.
¶ TCAS Symbols
The map is filled with all intruder aircraft depending on:
- their distance (deduced from the interrogation and response round trip time)
- their altitude (as reported by the interrogated aircraft)
- their bearing (by the directional antenna from the response)
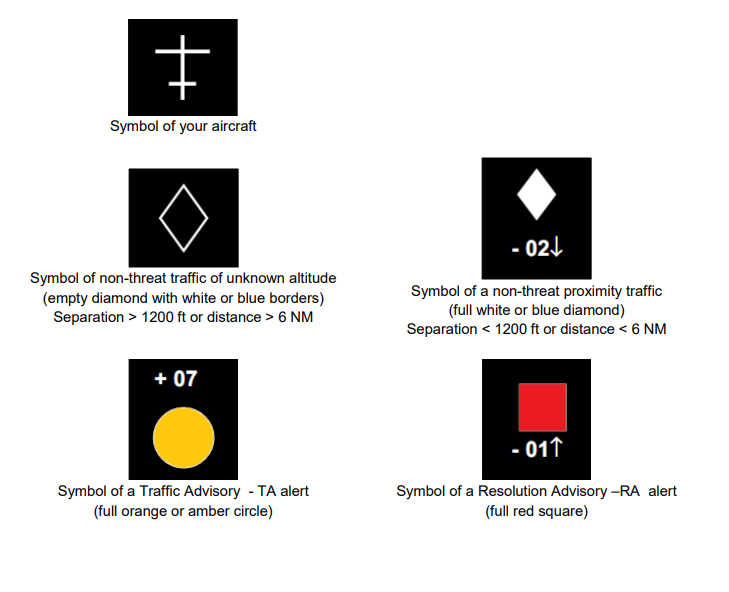
Traffic is represented by small geometrical symbols with associated numbers indicating the vertical separation with respect to your airplane, expressed in hundreds of feet.
For example:
- -012 = 1200 feet below
- 121 = 12100 feet above
- -02↓ = 200 feet below and descending
- +07 = 700 feet above
- -01↑= 100 feet below and climbing
¶ Advisories
Finally, by extrapolating the current range and altitude difference to anticipated future values, the system determines whether a potential collision threat exists.
TCAS is also an active system since it reports to the pilot the position of all aircraft inside the protected volume and warns the pilot about any risk of conflict.
Following the identification of potential collisions, the TCAS automatically negotiates a mutual avoidance manoeuvre (currently, manoeuvres are restricted to changes in altitude and modification of climb/sink rates) between the two (or more) conflicting aircraft. These avoidance manoeuvres are communicated to the pilot by a cockpit display and by synthesized voice instructions.
¶ Traffic Advisory (TA)
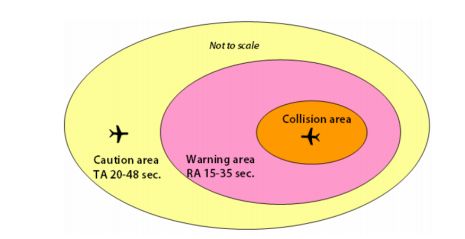
In the case of a potential collision, a sounding alert is emitted by the “Traffic Advisory” (TA). This system warns the pilot about every intruder aircraft by a “traffic, traffic” vocal announcement. It does not provide any avoidance manoeuvre suggestion.
TAs are nominally generated 20–48 seconds prior to the predicted Closest Point of Approach which would be 10–13 seconds earlier than any RA, although shorter generation times are possible in some geometries – indeed, in certain cases an RA can occur without a preceding TA. The majority of TAs will not be followed by an RA because often the separation between the aircraft does not drop below the alert threshold for an RA. On average, only 1 in 10 TAs will be followed by an RA.
When a TA is issued, the pilot is meant to initiate a visual search for the traffic causing the TA. If the traffic is visually identified, the pilot has to maintain visual separation.
He is also supposed to avoid any horizontal manoeuvre based on the solely information shown on the traffic display. On the contrary, slight adjustments in vertical speed while climbing or descending, or slight adjustments in airspeed while still complying with the ATC clearance are acceptable.
TA alerts shall not be used by the pilot to separate himself with other pilots especially in controlled area.
¶ Resolution Advisory (RA)
Whenever the conflict situation gets worst after a TA alert and the collision seems impending, an audio message and a visual alert are generated by the « Resolution Advisory » (RA). This alert indicates the concerned airplane and suggests an avoidance action to be immediately executed by the pilot.
The system is conceived in such a way that the TCAS of the other airplane suggests another action.
For example when the TCAS provides a climb advisory to one airplane, the TCAS of the other aircraft suggests a descent suggestion, which gives an increased separation between the two aircraft.
Although the system may sometimes cause false alerts, pilots are instructed to strictly consider all TCAS messages as real alerts which require an immediate action. In the case of a difference between the TCAS RA and ATC instructions, the TCAS RA has always priority.
As soon as the alert disappears, the system announces « clear of conflict ».
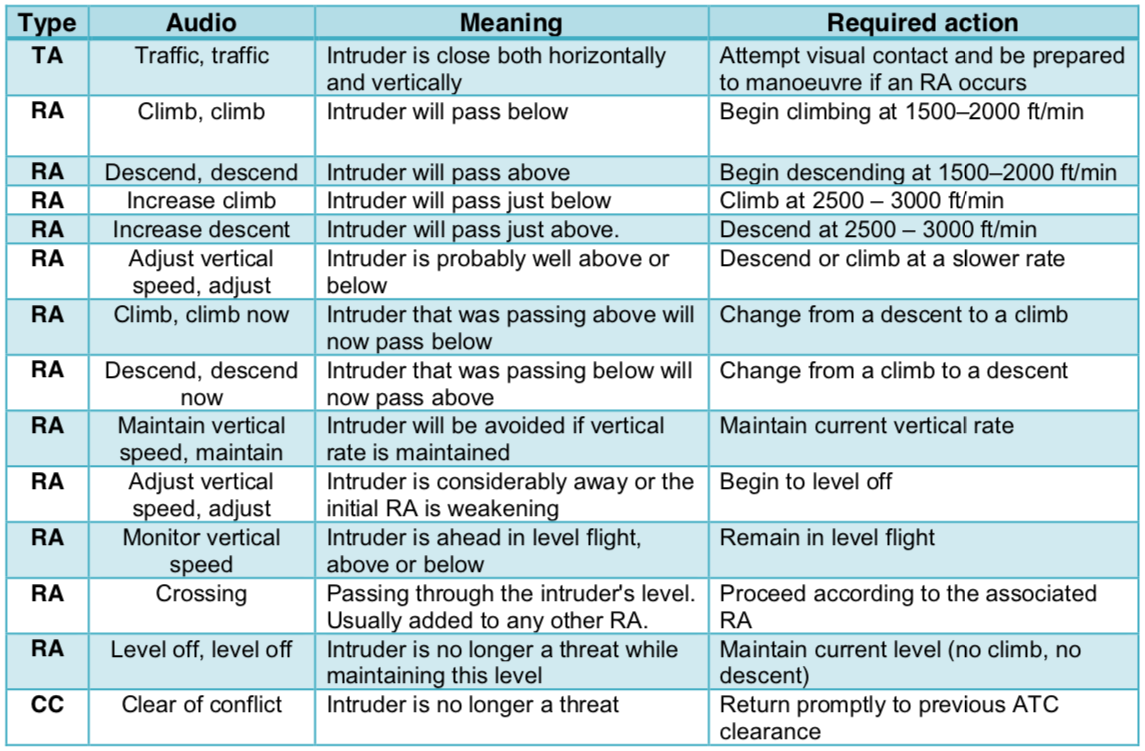
¶ List of TCAS Advisories
The list of TCAS advisories is presented below:
¶ Purpose of the TCAS II system
During normal operation, the TCAS II system operates on a one-second cycle basis and
performs its basic functions. These functions are discussed in more detail below:
¶ Features of the TCAS II application system in RVSM airspace
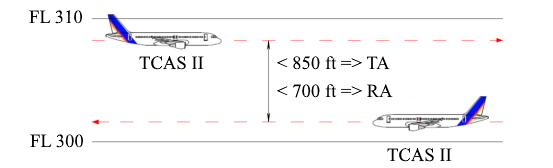
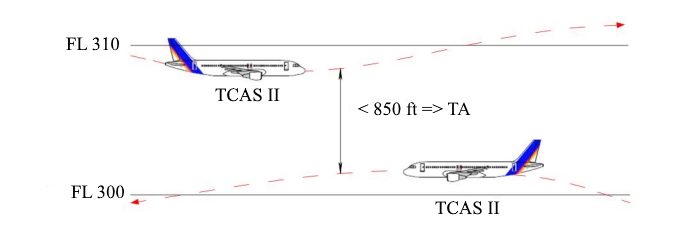
¶ Offset in the vertical plane
The participants in such rendezvous are aircraft performing a horizontal flight on subsequent FLs. Due to technical inaccuracies in keeping height, the trajectory of each of the aircraft can be shifted vertically towards the other. As a result, the height estimate separation between these aircraft used by the logic program of TCAS II systems is less than 1000 ft. When the height difference reaches 850 ft, (=>) will be issued warning TA, and at a difference of 700 ft - advice RA
Pilots in this case should not ask the air traffic controller for information about air traffic, as well as to maneuver on the basis of only TA. ACAS II systems can issue limiting recommendations. Such an event will not affect the work of air traffic controllers in any way.
¶ Flight path fluctuations
The participants in such rendezvous are aircraft performing a horizontal flight on subsequent FLs.
When maintaining a given altitude, the flight path of the aircraft may fluctuate vertically. As a consequence, the altitude separation estimate between these aircraft may be less 1000 ft, and in some rare cases a TA warning may be issued.
This option is a rare event, since the issuance of a TA is possible when one aircraft is switched on by the transponder of the ATC RBS (air traffic control radar beacon system) mode with a data quantization interval about altitude of 100 feet, or when the amplitude of the simultaneous oppositely directed oscillations of the trajectories of the aircraft is 51 feet.
Pilots in this case should not ask the air traffic controller for information about air traffic, as well as to maneuver on the basis of only TA. Such an event will not affect the work of air traffic controllers in any way.
¶ Atmospheric turbulence
There may be cases of approaching an aircraft that has entered the zone of atmospheric turbulence or wake turbulence. At the same time, sharp deviations are observed in the direction of another aircraft located at an adjacent oncoming echelon, with a large instantaneous vertical speed and significant acceleration. Logic programs of systems TCAS II may issue TA recommendations or even “sudden” RAs
Pilots in this case should not ask the air traffic controller for information about air traffic, as well as to maneuver on the basis of only TA. ACAS II systems can issue limiting recommendations. Such an event will not affect the work of air traffic controllers in any way.
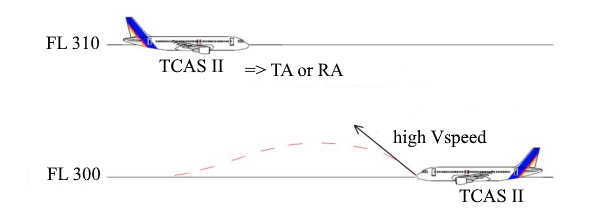
¶ Return to level flight at an adjacent flight level
In such cases of approach, one aircraft flies horizontally at its cleared flight level, and the other aircraft occupies an adjacent flight level permitted to it by climbing or descent with a sufficiently high vertical speed, for example 12 m/s
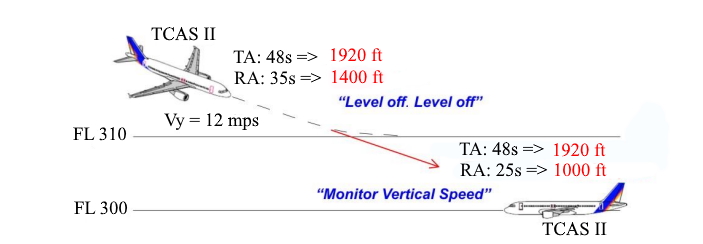
As a result of the calculation, the logical programs of TCAS II systems will predict what that at such a vertical speed both aircraft will soon be at the same height. In such cases, the TCAS II systems of both aircraft issue first TA warnings, and then RA recommendations are possible.
These RAs may be considered unwanted by air traffic controllers and pilots. However, if the maneuvering aircraft, while occupying the cleared flight level, performs an exit to level flight with an excessively high vertical speed (more than 7.6 m / s), issued RAs will be necessary.
¶ TCAS II Operating Limits
-
The TCAS II system does not detect or track the movement of aircraft with disabled or faulty transponders and transponders that do not meet the standards ICAO
-
The TCAS II system has a limited amount of data about its aircraft and can issue a command for a maneuver that reduces the margin for stalling into a tailspin. Conditions where possible include:
- flight with a roll of more than 15 deg;
- engine failure;
- abnormal adjustment of the aircraft, for example, unretracted landing gear; - flight of temperature at a temperature that differs from the generally accepted atmosphere (ISA) by more than ± 28.7 deg C or flight in icing conditions;
- flight at speeds below normal speeds and with small margins along the borders attack.
-
The TCAS II system does not take into account errors in barometric altimeters.
-
The algorithms of the TCAS II system are predictive in nature, based on aircraft in vertical speed.
-
TCAS II limits advisories based on altitude (according to radio altimeter):
- at an altitude below 440 m, commands for accelerated descent are not issued (“Increase Descent, Increase Descent");
- at an altitude below 335 m, commands for descent are not issued (“Descend, Descend”);
- at an altitude below 305 m, the TCAS II system enters the "TA ONLY" mode. No voice commands are issued;
- at an altitude below 116 m, no TA warnings are issued.
¶ Typical radio traffic phraseology when TCAS II is triggered
| Situation | Priority pilot's report | The text of the pilot's report | ATC Reply |
|---|---|---|---|
| The crew started performing a maneuver by RA | At the beginning of the maneuver | "TCAS RA" (recommendation from TCAS II to climb or descend) | «ROGER» |
| After the message TCAS II systems "Clear of conflict" | At the beginning of the return to the previously occupied altitude / flight level | «CLEAR OF CONFLICT, RETURNING TO FL XXX» | «ROGER» |
| The crew failed to report the RA command during the maneuver | After completion of the return to the specified altitude / flight level | «CLEAR OF CONFLICT, FL XXX RESUMED» | «ROGER» |
| In the event that an air traffic controller command cannot be executed due to an RA | During the maneuver | «UNABLE, TCAS RA» | «ROGER» |
¶ TCAS in IVAO
The TCAS is a function available in our IVAO pilot interface.
This means that it is always available regardless the aircraft model you choose, even for airplanes which are not equipped in real life. It is up to you to make use of it or not depending on the aircraft you fly with and on the degree of realism you wish to reach.
To learn how TCAS works in the IVAO interface, follow the link below.
https://wiki.ivao.aero/en/home/devops/manuals/altitude
AIRBORNE ELECTRONIC SAFETY SYSTEMS FOR AIRCRAFT FLIGHTS
VID 582348 - Creation